











 Spanish (pdf)
Spanish (pdf)
 Article in xml format
Article in xml format Article references
Article references
 Send this article by e-mail
Send this article by e-mail Cited by SciELO
Cited by SciELO  Cited by Google
Cited by Google  Similars in
SciELO
Similars in
SciELO  Similars in Google
Similars in Google 
 Permalink
Permalink
Introducción
La década del 60 destacó en el ámbito de la investigación y reconstrucción de accidentes de tránsito, a través de la participación de investigadores y miembros de la Society of Automotive Engineers [SAE], quienes a través de diferentes pruebas y experimentos desarrollaron metodologías para estimar coeficientes de fricción de varios tipos de vehículos, dentro de los cuales se encuentran: automóviles, camiones livianos, autobuses y motocicletas; inicialmente utilizados para introducir en el mercado automotriz, estándares de calidad en los diferentes sistemas de seguridad tanto activos como pasivos (SAE, 1965).
En ese orden de ideas, se encuentran autores como Bajer (1968), Goodenow et al. (1968) y Davisson (1969), quienes desarrollaron diferentes métodos para determinar estos coeficientes con base en las distancias de derrape, los cuales fueron empleados por el subcomité de neumáticos de la SAE en pruebas sobre diversas superficies, para con ello regular el mercado de este tipo de productos.
En los años subsiguientes, más investigadores se unieron para determinar con mayor precisión los datos obtenidos por los autores iniciales, destacándose en los inicios de la década del 80, Warner et al. (1983), los cuales describen los fenómenos que afectan el desempeño de los neumáticos causados por diversos factores, como la presión de inflado, fuerzas laterales causadas por el movimiento del vehículo e incluso la misma velocidad de circulación.
Los resultados obtenidos en sus diferentes experimentos, derivaron las primeras tablas de coeficientes de fricción (Warner et al., 1983), en las cuales se desglosan principalmente los coeficientes de fricción que deben ser aplicados por los investigadores y reconstructores de accidentes de tránsito, para determinar las velocidades de diferentes rodantes ya sea antes o después del impacto, sobre diferentes superficies, condiciones climáticas, e incluso presenta coeficientes independientes para motocicletas, deslizamiento de cuerpos para aplicación en casos de atropello y otros coeficientes de carácter especial.
Desde entonces, tablas de coeficientes de fricción han sido sometidas a actualizaciones por otros autores (Fricke y Baker, 1990), los cuales han hecho uso de nuevas tecnologías (Bartlett y Wright, 2010) que han permitido obtener datos más precisos que los obtenidos inicialmente, aunado a la propuesta de nuevos coeficientes de los cuales no se tenía información y han sido necesarios por la particularidad de cada investigación; lo anterior por medio de sensores especializados, acelerómetros digitales, soluciones low cost, entre otros (Remolina et al., 2019).
Para un investigador, lograr establecer el coeficiente de fricción o factor de desaceleración a utilizar (según sea el caso) dentro de los modelos físicos para cada escenario de accidente, es determinante, ya que deben considerarse aspectos tales como: la geometría de la vía, nivel de humedad de la superficie, tipo de superficie y, en algunos casos, debe tenerse en cuenta si el lugar de los hechos registra una curva con pendiente, curva sin pendiente, curvas con peralte o con ausencia de este (Rivers, 2006).
De la correcta interpretación del lugar de los hechos y la aplicación del coeficiente correspondiente, es posible proponer hipótesis técnicas, científicas y duplicables, que permitan demostrar objetivamente con resultados muy aproximados a la realidad la dinámica de eventos que originaron un accidente de tránsito.
Sin embargo, pese a que es posible, de forma teórica, determinar un coeficiente de fricción o factor de arrastre de acuerdo a la superficie de rodadura por la cual se desplace un móvil, a partir de la utilización de la fórmula:

Donde:
µ = Coeficiente de Fricción
V 2 0 = Velocidad inicial
V 2 f = Velocidad final
g = Aceleración de la fuerza de gravedad
d = Distancia de desaceleración - frenado
Se observa en la fórmula, que se requiere conocer el valor de dos de las variables que, sin sus valores, hace imposible el desarrollo de la ecuación, estos son: la velocidad inicial (V 2 0 ) o la velocidad final (V 2 f ) del vehículo, y en la práctica son justamente estos los valores los que normalmente se requiere conocer en una reconstrucción de accidente de tránsito, ya que son la información primordialmente requerida para las autoridades judiciales con el fin de endilgar posibles responsabilidades en el ámbito penal, civil o administrativo.
De hecho, las metodologías empleadas por los investigadores anteriormente enunciados que han presentado los resultados obtenidos en sus trabajos y que se traducen en las tablas (Fricke y Baker, 1990; Bartlett y Wright, 2010), precisamente han realizado las pruebas en entornos controlados, conociendo la totalidad de las variables, por lo que las estimaciones son completamente aplicables.
La cuestión que da origen a la presente investigación es justamente identificar y determinar algunos coeficientes que, al menos en Colombia, se han hecho necesarios para calcular velocidades donde no se registran evidencias relacionadas con huellas de frenado por bloqueo de llantas en el lugar de los hechos, pero que indudablemente permiten deducir maniobras de desaceleración o frenado por parte de los conductores de los vehículos, esto por medio de herramientas tecnológicas como un acelerómetro digital Vericom VC4000PC e información obtenida a partir de imágenes de video tomadas con un vehículo aéreo no tripulado (drone) y procesadas en software tracker ®, el cual ha sido implementado para fines académicos (Lenz et al., 2014).
La ausencia de datos concretos disponibles en referencia a los coeficientes de desaceleración o fricción de vehículos o motocicletas cuando no se presenta bloqueo de llantas, hace necesario plantear una serie de experimentos que permitan a partir de un protocolo la medición de las variables descritas anteriormente, para formular una serie de resultados que posibiliten a los investigadores de accidentes de tránsito, proponer velocidades pre o post impacto (según el caso) cuando se logra determinar las posiciones relativas de impacto y se cuenta con las posiciones finales (Álvarez y Luque, 2007).
La implementación de la tecnología de drones en múltiples aspectos de la cotidianidad de la industria, agricultura, investigación y desarrollo e incluso el ámbito militar (Ramesh y Muruga Lal Jeyan, 2020), ha permitido recolectar información de una manera que nunca se había logrado anteriormente en la historia moderna del hombre, tanto por la facilidad de acceso a los equipos, como a la posibilidad de múltiples configuraciones de carga paga que pueden ser instalados en estos dispositivos para obtener información de imágenes o datos, cuya interpretación ha facilitado la toma de decisiones en múltiples escenarios, principalmente en la agricultura (González et al., 2016) e ingeniería (González et al., 2019).
Por otro lado, más específicamente en el tema relacionado con la investigación y reconstrucción de accidentes de tránsito, los Vehículos Aéreos No tripulados [VANT] han sido empleados para recolectar fotográficamente los elementos materiales probatorios dentro del lugar de los hechos, como método alternativo al uso de estaciones totales de topografía y escáneres topográficos (N.C. Department of Transportation, 2017), cuyos resultados favorecen notoriamente el uso de estas aeronaves en cuanto al tiempo de afectación del tráfico, relevamiento de información fotográfica, costo de operación y calidad de información procesada, convirtiéndose en soluciones con destacada aceptación entre cuerpos de seguridad pública e investigadores privados.
Por otro lado, el análisis de imágenes de video adquiridos por varios dispositivos y este video procesado por el software educativo Tracker ® en el análisis de las imágenes de video para estudios experimentales de coeficientes de fricción (Hurtado et al., 2018), ha demostrado ser un método cuyos resultados fueron aceptables respecto a los modelos físicos aplicados; igualmente, en el estudio de colisiones inelásticas de un sólido esférico (Franco et al., 2021), cuyos hallazgos permitieron hacer aclaraciones respecto a la energía cinética disipada, con relación a la fuerza de rozamiento.
Estas investigaciones permiten deducir que el software educativo Tracker ® es una herramienta que facilita a través de una interfaz amigable, insertar información de archivos de video y generar un análisis basado en el seguimiento del algoritmo a los pixeles de la imagen seleccionados por el operador para realizar diferentes mediciones.
Adicionalmente, este software ha sido implementado por investigadores y analistas de video, para establecer velocidades de diferentes cuerpos ya sean personas o vehículos, a partir de información en video extraída de cámaras de seguridad, cuyos resultados han sido presentados en estrados judiciales con precisión razonable para la toma de decisiones de las autoridades.
Este trabajo tendrá como objetivo el uso de un VANT marca DJI modelo Mavic Pro, por medio del cual se obtendrán datos en video de desaceleraciones en condiciones controladas a dos motocicletas: una Suzuki GS500 tipo naked mecánica y una Yamaha BWS tipo scooter automática, y esta información digital procesada en el software Traker ®; adicionalmente, se instaló en la estructura de cada vehículo un acelerómetro digital VC4000, cuyos datos fueron comparados con los datos procesados del video, permitiendo determinar los coeficientes de desaceleración de estos vehículos y validar el empleo de VANT en la estimación pruebas para determinación de coeficientes de fricción / desaceleración, en condiciones que no son posibles por medio de otras herramientas tecnológicas disponibles.
Metodología
Se emplea una metodología experimental a partir de la observación, recolección, análisis e interpretación de datos en un entorno controlado, como se describe a continuación:
Elementos tecnológicos utilizados para ejecutar los experimentos:
1. Acelerómetro VC4 000PC.
2. UAV DJI Mavic Pro según Dà-Jiãng Innovations DJI (2022).
3. Motocicleta scooter marca Yamaha BWS FI 125, modelo 2021, longitud 1910 mm, anchura 765 mm, motor monocilíndrico, cuatro tiempos, peso llena 119 kg (262.4 lb), neumático delantero 120/70-12, neumático trasero 130/70-12, frenos delanteros Single disc. Two piston calipers, diámetro freno delantero 245 mm (9.6 pulgadas), Frenos traseros de disco, Diámetro freno trasero 245 mm (9.6 pulgadas), con llantas marca Michelin City Grip 2, profundidad de labrado 0.5 mm llanta delantera y 0.5 mm llanta trasera y 30 psi en su llanta delantera y 32 psi en la trasera.
4. Motocicleta Suzuki GS 500 modelo 2016, longitud 2080 mm, altura 1060 mm, motor cuatro tiempos, refrigeración por aire, DOHC, dos cilindros, peso llena 173 kg (346 lb), llanta delantera 110/70-17 M/C 54H, llanta trasera 130/70-17 M/C 62H, frenos delanteros y traseros simple disco, con llantas marca Michelin, 31 psi en su llanta delantera y 36 psi en la trasera.
5. Teléfono móvil iPhone 13 pro.
6. Kit de grabación trípode VTA.
7. Cinta métrica de 50 m.
8. Platos circulares de color rojo y verde.
9. Conos de señalización vial.
10. Chaleco reflectivo color naranja.
11. Abrazaderas plásticas de 15 cm.
12. Dos computadores marca Asus para procesamiento del software Tracker ® y un computador Mac.
Lugar seleccionado para los experimentos
Para la ejecución de los experimentos, se seleccionó una vía conformada por una calzada de 9,78 m de ancho, integrada por tres carriles de 3,48 m de ancho cada uno con único sentido de circulación, tramo recto, sin pendiente, construida en material asfalto nuevo y seco, como se observa en la Figura 1, actualmente en desuso ubicada en la ciudad de Bogotá D. C., Colombia.

Se ejecutaron diez maniobras de frenado, cinco para la GS500 y cinco para Yamaha BWS, con una velocidad inicial de 40 kph aproximadamente y velocidad final de 0 kph; de forma tal, que dicha desaceleración o maniobra de frenado se realizó de manera normal, sin bloquear las llantas ni ocasionar incomodidad en el conductor en cada operación. Para identificar el punto de inicio, se ubicó platos verdes, para límite de frenado, latos rojos, al efectuar diez ejercicios, se estableció una distancia de desaceleración promedio de 28.86 m, como se observa en la Figura 2.

Seguidamente, se realizó un vuelo con el UAV para determinar la altura de grabación, en la cual la línea de vista tomara por completo el recorrido desde el inicio de la maniobra hasta el final de la misma. Se establece que el ángulo de línea de vista es de 65,48°, capta video a 3840x2160 24/25/30p y la altura requerida fue de 32 m; debe tenerse en cuenta que el cuadro de imagen de la cámara del UAV no es un tetrágono (cuadrado), sino un paralelogramo (rectángulo); lo que hace necesario que el operador realice el giro de guiñada correspondiente para ajustar la imagen donde sea posible captar la mayor cantidad de espacio a medir.
Para efectos de comparación de videos, se ubicó una posición trasversal a la calzada en la cual fuera posible obtener la totalidad del área de desaceleración, con el teléfono móvil iPhone 13 Pro, contando una distancia máxima de 19.8 m, la cual no fue suficiente para captar el área, por lo que se utilizó la herramienta que ofrece este dispositivo de cámara gran angular, zoom de 0.5x, incrementando el campo visual del dispositivo, con la que se registraron los experimentos.
Finalmente, de acuerdo con la estructura de cada una de las motocicletas, se instaló el acelerómetro VC4000, en la Suzuki GS 500 sobre el tanque de combustible, utilizando la ventosa; y para la Yamaha BWS sujetada por medio de abrazaderas plásticas ante la imposibilidad de contar con una superficie lo suficientemente amplia para la ventosa (ver Figura 3).

Establecida la metodología general, se procedió a realizar los siguientes experimentos para la recolección de los datos:
1. Experimento motocicleta Suzuki GS 500 13/05/2022, inicia 13:39 horas, finaliza 15:57 horas.
Condiciones atmosféricas de vuelo: viento de 8 km/h, ráfagas de 17 km/h, precipitaciones del 7 %, visibilidad de 16 km, temperatura de 17 c y KP 3.
Se realizan diez pruebas, registradas en video por el UAV y el teléfono móvil iPhone 13 pro en su totalidad, siete de ellas registraron información útil para el análisis en el acelerómetro VC4000, las tres restantes se consideran error por activación anticipada del dispositivo, por lo que no se generaron datos.
El consumo de baterías del UAV para las diez pruebas, fue de dos baterías con tiempo de vuelo 20 min cada una, aterrizando al 25 % de batería restante.
2. Experimento motocicleta Yamaha BWS 27/05/2022, inicia 10:40 horas, finaliza 11:30 horas.
Condiciones atmosféricas de vuelo: superficie asfáltica seca, viento de 9 km/h, ráfagas de 15 km/h, precipitaciones del 6 %, visibilidad de 16 km, temperatura de 16 c y KP 1.
Se realizan diez pruebas registradas en video por el UAV y el teléfono móvil iPhone 13 pro en su totalidad. Al verificar los datos de desaceleración, se identificó un valor muy alto de coeficiente arrojado por el acelerómetro, determinado que la causa fue un error en la distancia predeterminada para la maniobra (28,86 m), por lo que se programó un nuevo experimento.
El consumo de baterías del UAV para las diez pruebas, fue de una batería con tiempo de vuelo 20 min, aterrizando al 30 % de batería restante.
3. Experimento motocicleta Yamaha BWS 06/06/2022, inicia 08:15 horas, finaliza 09:50 horas.
Condiciones atmosféricas de vuelo: viento de 10 /h, ráfagas de 22 km/h, precipitaciones del 28 %, visibilidad de 4 km, temperatura de 14 c y KP 2.
Se realizan ocho pruebas, ninguna se registró en video debido al mal funcionamiento de acelerómetro, por lo que no hubo datos para hacer cotejo de información.
El consumo de baterías del UAV para las ocho pruebas, fue de una batería con tiempo de vuelo 18 min, aterrizando al 35 % de batería restante.
4. Experimento motocicleta Yamaha BWS 07/06/2022 inicia 07:50 horas finaliza 09:00 horas.
Condiciones atmosféricas de vuelo: viento de 7 km/h, ráfagas de 16 km/h, precipitaciones del 8 %, visibilidad de 16 km, temperatura de 13 c y KP 1.
Se realizan 16 pruebas registradas en video por el UAV y el teléfono móvil iPhone 13 pro en su totalidad, nueve de ellas registraron información útil para análisis en el acelerómetro VC4000, las restantes se consideran error por activación anticipada del dispositivo por lo que no se generaron datos.
El consumo de baterías del UAV para las nueve pruebas, fue de dos baterías con tiempo de vuelo 20 minutos cada una, aterrizando al 20 % de batería restante.
Análisis e interpretación de datos
Para analizar e interpretar los datos obtenidos en video tanto del VANT como del teléfono móvil, se requiere el uso de software estudiantil de uso libre Tracker ® (ver Figura 4), para lo cual se efectuó el siguiente procedimiento:
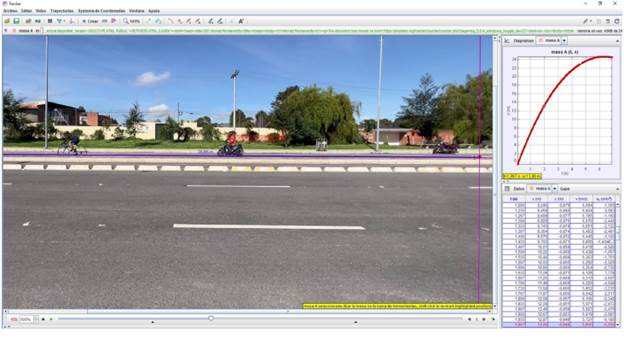
Figura 4 Extracto de pantalla de software Tracker, procesamiento de los videos tomados con el IPhone
En la plataforma del software se cargó cada uno de los videos, donde se requiere establecer un parámetro de referencia para la medición, el cual, como se indicó anteriormente es de 28,86 m, seguidamente se establece el eje de recorrido del cuerpo al que se va a hacer la medición horizontal para videos del teléfono móvil iPhone y vertical para el UAV (ver Figura 5).
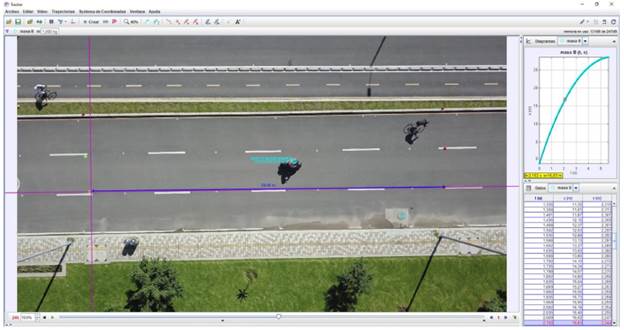
Figura 5 Extracto de pantalla de software Tracker, procesamiento videos tomados con el UAV Mavic Pro
Se debe tener en cuenta que el software hace seguimiento manual o automático a un conjunto de pixeles que se establecen por parte del operador, por lo que, en lo posible, debe haber un elemento en el cuerpo a seguir cuya forma y color se destaque del resto del entorno para que no se presenten errores en el seguimiento de los pixeles, fotograma por fotograma. Así las cosas, para el experimento uno se estableció la masa a seguir en el casco del conductor de la motocicleta, mientras que para el experimento número cuatro el lugar seleccionado es el hombro del motociclista.
Los datos extraídos del acelerómetro a través de su interfaz y de los videos a partir del software Tracker ®, son procesados en Microsoft Excel, correlacionado el nombre de archivo del video del UAV con el del iPhone y del consecutivo del VC 4000, obteniendo la siguiente información:
La información registrada en las tablas 1 y 2, condensan la totalidad de pruebas realizadas, la prueba (2) fue ejecutada con la motocicleta Suzuki GS500, mientras que la prueba (4) con la Yamaha BWS; en estas se correlaciona la información obtenida por la cámara de video del UAV y los datos extraídos del acelerómetro digital VC4000, en la columna izquierda se registró el número asignado al video según el consecutivo del sistema del UAV, las columnas siguientes registran la fecha de realización de la prueba y los resultados obtenidos de la media estadística de la totalidad de datos extraídos por cada uno de los sistemas.


Finalmente, los datos inferiores fuera de la tabla presentan: CF (coeficiente de fricción por media estadística) y DE (desviación estándar del mismo).
Para el análisis estadístico se generan las figuras de ambos experimentos, en primer lugar, el experimento (2) con la motocicleta Suzuki GS500, donde se correlacionan los coeficientes obtenidos con el análisis de video como variable dependiente y los datos del acelerómetro como variable independiente, igualmente se genera la línea de tendencia y regresión lineal de los datos.
En la figura 6 se evidencia dispersion de puntos con un valor de R 2 relativamente bajo, lo cual no es un resultado favorable para este experimento, permitiendo deducir una correlación mínima de los datos de acuerdo con la diferencia de valores en cada una de las nueve pruebas de donde se logró extraer información; no obstante, esta variación de datos y correlación mínima entre los mismos puede asociarse más a la capacidad del conductor de la motocicleta para la ejecución de cada maniobra de frenado, como, por ejemplo, una mayor presión en palanca y pedal de freno generando desaceleraciones poco homogéneas y variaciones en los datos, pero no asociable con las herramientas de medición y los datos obtenidos por medio de cada una de ellas.

Figura 6 Correlación coeficientes de fricción UAV/VC4000 adquiridos en la prueba 2 con la motocicleta Suzuki GS500, línea de tendencia y regresión lineal
Por otro lado, se presentan los resultados del análisis estadístico a partir de los datos generados en el experimento (4) motocicleta Yamaha BWS, de los coeficientes de fricción obtenidos igualmente por medio del UAV Mavic Pro y el acelerómetro digital VC4000.
A diferencia de la figura 6 presentada inicialmente, en la figura 7 se observa que los resultados obtenidos en el experimento (2) presentan una dispersión mucho menor de los puntos y un valor de R 2 alto cercano a 1, por lo que se deduce que la correlación de los datos es muy aceptable, lo que permite afirmar que la información de imágenes de video adquiridas mediante el UAV es información precisa y confiable; dependiente, en este caso, las condiciones de la prueba realizada y particularmente el comportamiento de cada conductor al enfrentar la maniobra de frenado indicada.

Figura 7 Correlación coeficientes de fricción UAV/VC4000 adquiridos en la prueba 4 con la motocicleta Yamaha BWS, línea de tendencia y regresión lineal
A continuación, se realiza un análisis de correlación individual de los experimentos realizados con cada una de las motocicletas, donde se presentan las líneas de tendencia según la herramienta utilizada y el número del experimento. De esta manera, se pueden comprender los argumentos enunciados anteriormente, donde la causa de la variación en los datos adquiridos no obedece, necesariamente, a la herramienta tecnológica por medio de la cual se adquiere el dato, sino en este caso el factor humano contribuye al error en el análisis, error traducido en la variabilidad del conductor de la motocicleta del primer experimento en la ejecución de cada maniobra de frenado, ocasionando dispersión de los puntos obtenidos según cada coeficiente de fricción calculado.
En la figura 8 se observa la correlación de los coeficientes obtenidos tanto por el acelerómetro, como por el procesamiento de las imágenes del UAV. De esta manera, se nota una leve variación en el comportamiento de los datos; sin embargo, esta variación no invalida la información procesada ya que como se puede observar, básicamente dos de los diez datos muestran la mayor variación, lo que puede obedecer no a la adquisición de los datos o calibración de las herramientas, sino a la maniobra de frenado como tal.

Figura 8 Correlación de coeficientes de fricción adquiridos con las dos herramientas aplicadas en una motocicleta Suzuki GS500
Igualmente, se observa que la información obtenida por medio del UAV presenta una estabilidad mayor en cuanto a la relación de datos, lo que podría obedecer a la sensibilidad de los sensores del VC4000.
Esta simetría en los datos sigue un patrón que permite deducir que la información adquirida a partir de cualquiera de las herramientas puede ser equiparable y comparable con una razonable precisión.
La figura 9 presenta una semejanza significativa en el procesamiento de la información y resultados de las pruebas, lo que permite afirmar que la información que se obtiene por medio del UAV puede ser tan precisa como la del mismo acelerómetro digital VC4000, en este caso, a diferencia de la prueba con la Suzuki GS500, la variación de los datos es muy inferior, permitiendo evidenciar una tendencia mucho más estable.

Figura 9 Correlación de coeficientes de fricción adquiridos con las dos herramientas aplicadas en una motocicleta Yamaha BWS
Esta estabilidad en los datos puede obedecer a una maniobra de frenado más estable por habilidad del conductor para mantener la desaceleración constante hasta velocidad final cero, localización del sistema de frenos en este tipo de motocicletas (dos palancas en el manubrio), lo que podría traducirse como un sistema con un mayor control de tensión por el motociclista por acción de las manos o un funcionamiento más eficiente del sistema de frenos en esta motocicleta, registrando desaceleraciones más constantes y resultados más estables.
Para una comprensión de los resultados obtenidos por cada tipo de motocicleta, se agrupan los datos de las pruebas en la Tabla 3, es decir, se procede a graficar la información.

La figura 10 presenta la variación de los coeficientes con las dos herramientas utilizadas por modelo por motocicleta; de lo cual, se puede determinar que las variaciones no son considerables y que, por tanto, la información obtenida a partir de los sensores tanto del UAV como por el VC4000 son equivalentes, constantes y confiables.

Figura 10 Correlación de información de las dos herramientas empleadas en cada una de las motocicletas, se adiciona la tendencia de los resultados
La figura 11 presenta la dispersión de los datos de manera lineal por experimento, en la cual se evidencia que, para el experimento o prueba 2, la correlación de la información es bastante estable y que no presenta dispersión significativa de la información, mientras que para el primer momento, sí presenta una dispersión considerable de los datos, esto se puede obedecer entre otras circunstancias al tipo de motocicleta, calibración del sistema de frenos de las máquinas, ejecución de la maniobra por cada uno de los conductores, localización del centro de gravedad de las motocicletas relacionado éste con mantener el equilibrio a velocidad final 0 km/h, localización del sistema de frenos en cada motocicleta, entendiendo que la Yamaha tiene dos palancas de frenado a la altura de las manos, mientras que la Suzuki cuenta con una palanca en la mano derecha y un pedal de freno en el mismo plano; sin embargo, el desempeño de los sistemas de frenado aunque ofrezca valores de coeficientes de fricción con relativa variación entre las motocicletas, es posible emplear la media estadística de los resultados obtenidos para efectos de estimación de distancias totales de detención sin forzar la máquina y sin generar maniobras de bloqueo de llantas, deslizamiento y pérdida de control del vehículo.

Figura 11 Dispersión de los datos de cada experimento, se observa una menor dispersión de datos en el experimento de la Yamaha BWS
En el análisis de la figura 12 sobre la dispersión de coeficientes, la información presentada evidencia que los dos modelos de motocicletas podrían tener diferentes tipos de frenos o, por lo menos, está rectificada en una motocicleta más que la otra. De tal manera, que para la motocicleta Yamaha los coeficientes de frenado, es decir, los coeficientes de fricción son mucho más estables que para la Suzuki, eso también se puede ver por el tipo de la marca, la categoría de la motocicleta, entre otras tantas cosas. Por consiguiente, se evidencia que los dos momentos del experimento con los dos tipos de motocicleta, los coeficientes de relación entre uno y entre otros no son distantes entre el UAV y entre el VC4000, por lo que se puede determinar según la información dada, ambos equipos de medición son muy precisos y que los decimales de dispersión que hay entre sus resultados son mínimos y no son lo suficientemente amplios para determinar que exista una diferencia considerable. Cuando se habla de decimales y que una diferencia sea muy pequeña, quiere decir que el grado de confianza entre uno y otro es bastante alto.

Entonces, se puede determinar que para esta figura se tienen dos experimentos, donde el que se encuentra representado en naranja presenta unos coeficientes de fricción mucho más estables que el azul, el cual tiene algunos datos más amplios y aun así se comporta con una tendencia relativamente estable frente a las herramientas utilizadas, estableciendo un coeficiente de fricción para este tipo de maniobras para una motocicleta tipo estándar naked es de 0,26±0,04, mientras que para una motocicleta scooter es de 0,22±0,01, con un promedio general de 0,24±0,02.
Estos resultados son compatibles con los resultados obtenidos por Fries et al. (1989), quienes realizaron pruebas con cinco tipos de motocicletas, efectuando maniobras de frenado aplicando al sistema máxima presión sin llegar al bloqueo de llantas únicamente con freno trasero, obteniendo coeficientes entre 0,31 y 0,52.
Adicionalmente, en ejercicios experimentales realizados con 18 motociclistas, llevados en sus vehículos a alcanzar una velocidad de 50 mph (80 km/h) e instruidos para detener su motocicleta en la menor distancia posible, se lograron coeficientes entre 0,44 y 0,52 (Hugemann y Lange, 1993).
Otros investigadores practicaron un significativo número de pruebas de frenado en superficies de asfalto y concreto seco, entre 1987 y 2006, donde se emplearon más de 112 tipos de motocicletas alcanzado velocidades iniciales antes de maniobra de 20, 30 y 40 mph (32.2,48,3 y 64,4 km/h), discriminadas en 275 pruebas con sólo freno posterior, 239 son únicamente freno delantero y 221 pruebas con frenos combinados, presentando resultados de coeficientes de 0,37±0,06 para frenos traseros, 0,60±0,16 con freno delantero y 0,74±0,15 con frenos combinados (Bartlett et al., 2007).
Lo que permite deducir que los coeficientes presentados en esta investigación son coherentes con el tipo de maniobra ejecutada, donde se buscó establecer dicho valor a partir de una maniobra donde no se generara la máxima eficiencia del sistema de freno, sino aquellas donde el frenado se pudiera considerar como normal sin causar incomodidades en el conductor, ni pérdida de control del vehículo.
Discusión
De la ejecución de los experimentos se observó que el UAV es una plataforma de obtención de datos tan confiable como un acelerómetro digital VC4000; a pesar de ello, para la recolección de los datos, sí se determina que el sistema de aeronave no tripulada es más estable, en el sentido de que el acelerómetro digital se activa con mayor sensibilidad y con estímulos externos de desaceleración o de cambios en la posición de la motocicleta, lo que requiere que se realicen muchas más mediciones. Igualmente, se encontró que esta activación no programada de los sensores del VC4000 genera información inútil para procesar, mientras que el UAV mientras cuente con la batería suficiente para mantener su vuelo estacionario, la recolección de información es constante mientras se estén captando las imágenes de video, ya que esta información obviamente es independiente al funcionamiento correcto del acelerómetro.
Por otro lado, aunque inicialmente se utilizó un teléfono móvil iPhone 13 Pro para la adquisición de video de manera horizontal a nivel, al momento de realizar el procesamiento del seguimiento de pixeles en el software Tracker ®, fue necesario ajustar la configuración del dispositivo para captar la totalidad de distancia de desaceleración (28,86 m), por lo que la cámara se activó con una apertura gran angular de 0,5x, lo que permitió abrir el ángulo de vista del teléfono satisfactoriamente; sin embargo, la curvatura en la imagen del video que no es evidente a simple vista, sí genera saltos significativos en los cambios de velocidad y aceleración en el tiempo por los cambios de los pixeles en el cuadro, por lo que esta información no arrojó resultados útiles para esta investigación y fue desechada.
De acuerdo con los resultados que se obtuvieron a lo largo de la ejecución de las pruebas, se logró establecer que la precisión de los datos obtenidos a partir del video de una cámara instalada en un sistema de aeronave no tripulada y procesada en un software de seguimiento de pixeles para calcular aceleraciones, velocidades, desplazamientos, entre otros, es tan confiable como los datos obtenidos por un dispositivo diseñado con dicho fin específico, por lo que se sugiere continuar con experimentaciones para determinar coeficientes de desaceleración en otras circunstancias, como ejemplo la desaceleración de buses articulados al aproximarse a intersecciones semaforizadas o estaciones para dejar o recoger pasajeros; igualmente, pueden realizarse mediciones para análisis de velocidad de circulación en tramos de vía, obteniendo resultados aplicables a reconstrucción de accidentes de tránsito donde no se logre obtener huellas de frenado o se requieran coeficientes de desaceleración o fricción específicos; igualmente, es posible realizar la estimación de coeficientes de fricción en trenes a partir de las desaceleraciones obtenidas en aproximación a estaciones de cargue y descargue.
La cantidad de pruebas que se pueden ejecutar para obtener datos interpretables, obedece a las condiciones atmosféricas al momento de realizar el vuelo del equipo, estado de las baterías del UAV, agilidad y planeación del escenario donde se realizará la prueba, mas no se encontró una relación directa con el tipo de cámara de video que se encuentra instalada como carga paga del sistema, ya que las cámaras actuales de los UAV comerciales y profesionales cuentan con la suficiente capacidad para obtener un video con buena calidad de pixeles; pese a lo cual, sí es importante tener en cuenta que a mayor altura para la toma de las imágenes de video evidentemente se amplía la línea de vista del UAV y se puede tomar una mayor distancia para la prueba, pero se pierde la capacidad de seguimiento de un pixel específico, por lo que si bien es cuerpo podría considerarse un problema, éste se resuelve generando un cambio de contraste importante entre la superficie de rodadura y el color del vehículo a realizar el seguimiento.
El desempeño del UAV para este tipo de misiones fue satisfactorio, se logran obtener datos en múltiples escenarios con una precisión significativa, permitiendo incorporar estos sistemas no sólo a la toma de fotografías de lugares de los hechos para reconstrucciones fotogramétricas, sino para la investigación científica en el campo de la reconstrucción de accidentes de tránsito.
Conclusiones
La presente investigación tuvo como objetivo presentar el uso de VANT como un método alternativo, versátil y de relativo menor costo, para la adquisición de datos que permitan establecer coeficientes de fricción o desaceleración de cualquier tipo de vehículo en diversas circunstancias cuya precisión es equiparable a la de un acelerómetro digital VC4000.
Para ese efecto, se desarrollaron experimentos con dos tipos de motocicletas: una estándar naked (Suzuki GS500) y una scooter (Yamaha BWS), en las cuales se midió una desaceleración desde los 40 km/h en una distancia de 28,86 m, utilizando un acelerómetro digital VC4000 y entretanto siendo filmadas por un UAV Mavic Pro a 32 metros de altura, obteniendo imágenes de video para ser procesadas en el software educativo Tracker®.
Realizado el procesamiento de los datos obtenidos por ambas herramientas, se pudo determinar que los coeficientes de desaceleración para maniobras de frenado sin bloqueo de llantas y sin generar incomodidad en el conductor de una motocicleta estándar naked es de 0,26±0,04, mientras que para una motocicleta scooter es de 0,22±0,01, con un promedio general de 0,24±0,02.
Se identificó una limitación en la toma de video debido a que, para captar la totalidad del área de desaceleración, se utilizó un teléfono móvil iPhone 13 Pro, contando una distancia máxima de 19.8 m, suficiente para captar el área, utilizando la herramienta que ofrece este dispositivo de cámara gran angular 0.5 x incrementando el campo visual del dispositivo, con la que se registraron algunos experimentos, pero al realizar el procesamiento de la información, se obtuvo variaciones erradas en los datos al compararlos con el video del drone, identificando que la variación se da debido a que la curvatura del lente en modo gran angular aumenta el ángulo de visión, pero afecta la perspectiva del video y por ende de la localización de los pixeles para el seguimiento.
A partir de lo observado en esta investigación, es pertinente proponer nuevos trabajos de medición de velocidades promedio en tramos de vías urbanas y rurales, que permitan hacer los ajustes correspondientes en la señalización o campañas de seguridad vial; igualmente, análisis de aceleraciones y desaceleraciones en intersecciones donde se presente un índice significativo de accidentes de tránsito, para proponer soluciones efectivas que generen el impacto necesario en la movilidad.
En conclusión, a partir de la metodología aplicada, es posible afirmar que los datos obtenidos por un UAV son tan precisos en la medición de coeficientes de fricción como los datos adquiridos por un acelerómetro digital VC4000, debido a lo cual, es un método confiable, con un relativo menor costo y con una amplia gama de posibilidades de ejecución de misiones que podrá facilitar la investigación académica y científica en el ámbito de la reconstrucción de accidentes de tránsito.

