











 Spanish (pdf)
Spanish (pdf)
 Article in xml format
Article in xml format Article references
Article references
 Send this article by e-mail
Send this article by e-mail Cited by SciELO
Cited by SciELO  Cited by Google
Cited by Google  Similars in
SciELO
Similars in
SciELO  Similars in Google
Similars in Google 
 Permalink
Permalink
1. INTRODUCCIÓN
La transición energética se ha convertido en un tema de importancia global, impulsado por la necesidad de abordar el cambio climático y garantizar un suministro energético sostenible para las generaciones futuras. En este contexto, las microrredes emergen como un concepto clave que promete una solución sostenible, especialmente en regiones remotas que carecen de acceso a la red eléctrica principal. Estas microrredes, sistemas de potencia a pequeña escala, ofrecen una serie de ventajas notables en términos de eficiencia energética, aprovechando particularmente las tecnologías de corriente continua (DC).
Las microrredes basadas en DC han demostrado ser altamente eficientes y versátiles en la integración de fuentes de energía renovable, como la solar y la eólica. Un aspecto clave que distingue a las microrredes DC es su capacidad para evitar la conversión innecesaria entre corriente alterna (AC) y corriente continua, lo que reduce las pérdidas de energía [1]-[4]. Esto resulta fundamental en el contexto de la transición energética, ya que la eficiencia energética es un pilar fundamental para la reducción de emisiones de gases de efecto invernadero y la mitigación del cambio climático.
Una característica destacada de las microrredes es su flexibilidad operativa. Pueden funcionar conectadas a la red eléctrica principal o de manera aislada, adaptándose a las necesidades específicas de la comunidad o región en la que se implementen [5]. Sin embargo, esta flexibilidad también plantea desafíos, especialmente en el caso de las microrredes aisladas. Las pequeñas variaciones en la carga pueden generar perturbaciones de voltaje que amenacen la estabilidad del sistema. Por el contrario, las microrredes conectadas a la red principal se benefician de márgenes de estabilidad más amplios, respaldados por la aportación de la red eléctrica principal [5], [6]
El concepto de estabilidad en sistemas eléctricos es crítico para su operación segura y confiable. En este contexto, la estabilidad se refiere a la capacidad de un sistema eléctrico de retornar a un estado de equilibrio después de una perturbación que altera su topología o condiciones de funcionamiento [7]. Específicamente, la estabilidad de pequeña señal se enfoca en perturbaciones de menor magnitud, como modificaciones en la carga. Sin embargo, en el caso de las microrredes, este problema se vuelve más desafiante debido a la baja inercia de las componentes de generación, que suelen ser Fuentes no Convencionales de Energía Renovable (FNCER) [7]-[10]
En última instancia, las microrredes DC representan una herramienta valiosa en la transición hacia un sistema energético más limpio y sostenible. Su alta eficiencia y capacidad para aprovechar fuentes de energía renovable las convierten en un activo importante en la lucha contra el cambio climático. Sin embargo, es esencial abordar los desafíos relacionados con la estabilidad, en particular la de pequeña señal, para garantizar el éxito y la confiabilidad de estas microrredes en el marco de la transición energética global.
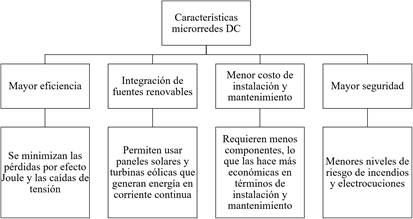
Las microrredes sirven como suministro de energía a un conjunto de usuarios residenciales ubicados dentro de una misma localidad, o también para industrias y empresas. Las microrredes pueden ser de tres tipos AC, DC o híbridas AC/DC [2]. Las microrredes en general presentan diferencias con respecto a las redes eléctricas tradicionales y son importantes por las características indicadas en la Figura 1.

Por su parte, las microrredes DC son una solución innovadora en energía al reducir la necesidad de costosos convertidores y minimizar las pérdidas de energía asociadas a la conversión de corriente [2]. Al utilizar corriente continua desde la generación hasta la distribución, simplifican la infraestructura eléctrica, lo que conlleva ahorros y eficiencia al evitar las pérdidas que ocurren en las conversiones de corriente alterna a continua y viceversa [2]. Adicionalmente la mayoría de las cargas residenciales como iluminación led, televisores, cargadores de celulares, entre otros, emplean una tensión en DC para su funcionamiento. Sumado a esto se encuentra la creciente inmersión de los vehículos híbridos y eléctricos en los últimos años, debido a las necesidades de llevar a cabo un desarrollo sostenible, los avances tecnológicos e innovación industrial que les permiten ser más competitivos en el mercado [1]. También se debe considerar el apoyo gubernamental y la creciente conciencia pública sobre la importancia de la sostenibilidad. Las características más importantes de las microrredes DC se muestran en la Figura 2.
1.1 Motivación
Las microrredes DC aún tienen algunos desafíos, como la falta de estándares establecidos en comparación con las redes AC y la necesidad de inversores o convertidores especiales para conectar dispositivos que requieran corriente alterna. A medida que las tecnologías continúan desarrollándose y los costos disminuyen, se espera que las microrredes DC jueguen un papel más significativo en la distribución de energía en el futuro, especialmente en áreas donde la resiliencia, la eficiencia y la integración de FNCER sean prioridad [11]
1.2 Revisión de la literatura
El comportamiento dinámico de las microrredes DC ha sido evaluado en diversas referencias. En [12], el autor presenta un modelo para estabilidad de pequeña señal en microrredes DC con vehículos eléctricos, encontrando que los valores propios complejos son fuertemente influenciados por los efectos inductivos y capacitivos de la red. En [13], los autores proponen un modelo dinámico para una microrred AC/DC híbrida e investigan la estabilidad de tensión de esta microrred para diferentes escenarios de fallas. En [14], los autores analizan una microrred DC aislada que integra turbinas eólicas y paneles fotovoltaicos, tomando como foco de la investigación el impacto del algoritmo seguidor de punto de máxima potencia sobre las variables de potencia entregada a la microrred y el perfil de tensión. En [15], los autores estudian la estabilidad de una microrred DC a través de un análisis de Lyapunov y empleando diferentes tipos de convertidores. En [16], los autores implementan un control de modo deslizante para un sistema híbrido, donde los parámetros se entrenan a través de una red neuronal artificial. En [17], los autores presentan el control activo de rechazo de perturbaciones en una microrred AC/DC, manteniendo el voltaje DC, la frecuencia y el flujo de potencia. En [18], los autores abordan la estabilidad estacionaria de microrredes DC de baja inercia, estableciendo límites de carga. En [19], los autores investigan la estabilidad y robustez de una microrred DC empleando diferentes tipos de cargas incluyendo potencia constante, impedancia y corriente constantes. En la Tabla 1 se muestra el resumen indicando las características de las microrredes empleadas como caso de estudio en las anteriores referencias.

TE: Turbina eólica, MF: Módulo fotovoltaico, BB: Banco de baterías, CR: Carga resistiva, VES: Vehículo eléctrico simplificado.
Este proyecto considera más componentes que los proyectos tomados como referencia, principalmente porque tiene en cuenta el modelo de vehículo eléctrico detallado, lo cual permite que las simulaciones cuenten con mayor precisión y por lo tanto muestren un comportamiento más cercano al real de la microrred DC.
1.3 Contribuciones
Las contribuciones de este documento comprenden: Análisis de estabilidad de pequeña señal considerando una microrred que emplea diversas fuentes de energías renovables y un banco de baterías. También se consideran múltiples condiciones operativas realizando variaciones de generación y demanda. La principal contribución de este documento es la implementación de un modelo detallado del comportamiento del estado de carga de los vehículos eléctricos que permite medir el impacto de penetración de estos en una microrred DC. La metodología propuesta en este documento mejora lo propuesto en la literatura técnica puesto que reúne todos los parámetros mencionados en la Tabla 1 y adiciona un modelo detallado de vehículos eléctricos, lo cual no se presenta en otros trabajos de este tipo. Finalmente, se implementación del control basado en comunicación para la microrred DC, el cual es un enfoque de sistema de control que se basa en el intercambio de información y datos entre diferentes componentes o dispositivos dentro de un sistema introduciendo un mayor nivel de coordinación y colaboración entre los componentes del sistema a través de los canales de comunicación.
1.4 Organización del documento
Este documento se encuentra organizado de la siguiente forma. En la sección 2 se describen los aspectos metodológicos, que abarcan el modelamiento dinámico para cada una de sus componentes, el tipo de control empleado, el procedimiento de simulación, y los índices de estabilidad. En la sección 3 se indican los resultados y discusión, junto con su respectivo análisis para cada uno de los escenarios de simulación propuestos. Luego, en la sección 4 se describen las conclusiones. En la sección 5 se indican los agradecimientos y financiación. Finalmente, en la sección 6 se presentan las referencias bibliográficas.
2. ASPECTOS METODOLÓGICOS
Para determinar el comportamiento dinámico de la microrred de DC considerando la incorporación de vehículos eléctricos, se consideró la metodología que se presenta en la Figura 3. Primero, se diseñó la microrred DC, la cual incorpora sistemas de generación (eólica y solar), cargas y un sistema de baterías, la microrred también se puede alimentar de la red de distribución externa. Segundo, se realizó la caracterización de los modelos dinámicos, en este punto se dimensionaron los componentes que están interconectados en la microrred DC, como los sistemas de generación solar y eólica, las baterías y el voltaje nominal de la barra DC de la microrred. Tercero, se realizó el modelo del vehículo eléctrico para conectarlo a la microrred, este se introdujo a la microrred como una carga ZIP de 7,5 kW por vehículo.

Fuente: elaboración propia.
Figura 3 Metodología para determinar el comportamiento dinámico de la microrred.
Posteriormente, se realizaron las simulaciones dinámicas necesarias para determinar la estabilidad de la microrred con la herramienta Matlab/Simulink, se consideró un tiempo de simulación de 10 segundos para cada condición operativa. En las simulaciones se utilizó el método numérico de integración de Runge Kutta de orden cuatro. Para estas simulaciones se tuvieron en cuenta tres escenarios de integración de vehículos eléctricos para evaluar el comportamiento dinámico de la microrred DC. A través de simulaciones realizadas en estos escenarios, se determinaron los casos bajo los cuales la microrred puede experimentar caídas drásticas de tensión. Finalmente, se realizó un análisis de los resultados obtenidos, identificando los casos críticos en los que la microrred pierde la estabilidad.
La microrred DC está compuesta por una planta de generación solar de 19,2 kW, una planta de generación eólica de 11 kW y un arreglo de baterías de 24 V con 100 Ah de capacidad. Además, la microrred está conectada directamente a la red. El voltaje de operación de la barra DC de la microrred es de 250 V. Durante los análisis, se consideró una carga variable entre 3,9 kW y 62,5 kW. En seguida se describen los componentes de la microrred DC, el método utilizado para realizar las simulaciones y los índices utilizados para evaluar los resultados.
2.1 Turbina eólica
Las turbinas eólicas se describen a partir de cuatro submodelos para la velocidad del viento, el rotor, el eje y el generador. En las simulaciones dinámicas de sistemas de potencia, resulta beneficioso emplear un modelo para el rotor de la turbina eólica que trate el viento como un valor constante único (en lugar de un campo de velocidades del viento) y descarte la geometría específica de las aspas [20]. Esto conduce al modelo cuasiestático del rotor, donde la potencia (P m ) contenida en el viento tiene una relación algebraica con la velocidad del viento (v wind ), como se presenta en (1).

donde ρ es la densidad del aire A, es el área barrida por las aspas c p (λ,β), es el coeficiente de desempeño que permite representar la efectividad de la turbina eólica en la extracción de la potencia considerando la aerodinámica de su rotor [20]. El eje de la turbina eólica puede ser modelado mediante un conjunto de masas acopladas. El más utilizado en estudios de estabilidad es el modelo de dos masas, donde cada una de ellas representa las componentes de la turbina moviéndose a diferentes velocidades [20].
Para el modelo del generador se usa la máquina sincrónica de imanes permanentes que puede funcionar como generador o como motor dependiendo del valor que tome el torque mecánico de entrada (positivo para el funcionamiento como motor, negativo para el funcionamiento como generador). Adicionalmente, se asume convencionalmente para esta máquina un circuito magnético lineal sin saturación para el estator y el rotor, esto debido a la longitud de los entrehierros empleados para este tipo de máquina [20]. El modelo trifásico sinusoidal para esta máquina con rotor devanado se describe a partir de (2) a (4).



donde, el subíndice d hace referencia el eje directo, el subíndice q hace referencia el eje de cuadratura, L es la inductancia i, es la corriente, v es el voltaje, R es la resistencia del devanado de estator, ωm es la velocidad angular del rotor, p es el número de pares de polos y T e es el torque eléctrico [20]. Dado que el generador entrega una señal en AC, se emplea un convertidor que comprende seis diodos de alimentación conectados en una configuración de puente, empleando elementos de electrónica de potencia naturalmente conmutados como se indica en la Figura 4.

2.2 Módulo fotovoltaico
Para el módulo fotovoltaico se emplea un conjunto de paneles solares conectados en paralelo, los cuales emplean el modelo de la Figura 5, en la cual I L es una fuente de corriente generada por luz, I d es la corriente del diodo, Rsh es la resistencia shunt y R S es la resistencia serie [20].
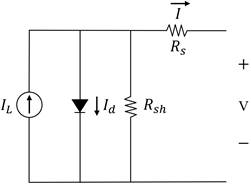
La característica corriente vs voltaje del diodo para un módulo fotovoltaico independiente se representa mediante (5) y (6).


donde, Vd es el voltaje del diodo, I 0 es la corriente de saturación del diodo, nl es un factor del diodo, k es la constante de Boltzman, T es la temperatura de la celda, q es la carga del electrón, N cell es el número de celda conectadas en serie en un módulo. El módulo fotovoltaico emplea un convertidor DC/DC [20].
2.3 Red eléctrica
Para el equivalente de red se especifica el nivel de cortocircuito y la relación X/R referentes al punto de conexión donde se conecta la microrred DC a la red eléctrica principal, como se indica en la Tabla 2. Los valores de potencia de cortocircuito se determinan utilizando (7) y (8).



Adicionalmente, se modela el transformador trifásico bidevanado de 1000 kVA (ver parámetros en la Tabla 3) y un convertidor AC/DC. Este elemento se usa únicamente cuando la microrred DC opera conectada a la red eléctrica principal.

2.4 Banco de baterías
El modelo dinámico del banco de baterías contiene una curva de descarga compuesta por tres secciones que representan la caída exponencial de voltaje cuando se carga la batería, la carga que se extrae de la batería hasta que el voltaje es inferior al voltaje nominal de la batería y la descarga total de la batería [20]. Para la batería de plomo ácido, el modelo corresponde a (9) y (10).
Modelo de descarga (i* > 0)

Modelo de carga (i* > 0)

donde, E 0 es el voltaje constante, K es la constante de polarización, Q es la capacidad máxima de la batería, i es la corriente de la batería, it es la capacidad extraída.
2.5 Vehículo eléctrico
Para el vehículo eléctrico se emplea el modelo de carga ZIP que es un polinomio de segundo orden y describe cómo la potencia depende del voltaje y exhibe las características de impedancia (Z) constante, corriente (I) constante y potencia (P) constante. Este modelo se basa en expresiones cuadráticas del voltaje de barra, como se muestra en (11).

donde, P o corresponde a la potencia activa cuando el voltaje de suministro es de 1 p.u. v es el voltaje de operación, v n es el voltaje nominal p 1 son los coeficientes de impendacia constante, p 2 son los coeficientes de corriente constante y p 3 son los coeficientes de potencia constante. Se usan valores diferentes de potencias para cada tipo de carga: resistencia constante, corriente constante y potencia constante [21]. Los parámetros de (11) que modelan cada estación de carga de vehículos eléctricos se proporcionan en la Tabla 4, y fueron determinados a través del método de mínimos cuadrados como se menciona en [21].

2.6 Tipo de control
El Control Basado en Comunicación (CBC) es un enfoque de sistema de control que se basa en el intercambio de información y datos entre diferentes componentes o dispositivos dentro de un sistema. En los sistemas de control tradicionales, cada componente opera de manera independiente, tomando decisiones basadas únicamente en sus mediciones locales y algoritmos de control. Sin embargo, el CBC introduce un mayor nivel de coordinación y colaboración entre los componentes del sistema a través de los canales de comunicación [22].
En un sistema CBC, varios dispositivos o controladores pueden compartir datos, lecturas de sensores y comandos de control en tiempo real. Este intercambio de información permite que los componentes tengan una comprensión más completa del estado y comportamiento general del sistema, lo que lleva a acciones de control más efectivas y eficientes [22].
Una implementación común del CBC es la automatización industrial y los sistemas de control de procesos. En estos sistemas, los sensores, actuadores y controladores se comunican entre sí a través de una red, como Ethernet o protocolos de barra de campo, para lograr un control coordinado y distribuido de todo el proceso. Las ventajas del CBC comprenden mayor flexibilidad, inteligencia distribuida, supervisión y gestión centralizadas. Sin embargo, la implementación del control basado en la comunicación también presenta desafíos relacionados con los retrasos en la comunicación, la confiabilidad de la red y posibles problemas de seguridad. El diseño adecuado, los protocolos de comunicación y los mecanismos de redundancia son esenciales para garantizar la confiabilidad y solidez del sistema [22].
El CBC que se plantea utilizar en la microrred DC realiza una acción de control sobre el estado de carga y descarga de la batería para mejorar el desempeño de la microrred. Mide las variables de la batería y de la barra DC para controlar el estado de carga y descarga de la batería por medio de controladores PI. El diagrama del control implementado se puede verificar en la Figura 6.

2.7 Índices de estabilidad
Los índices de estabilidad permiten conocer el nivel de estabilidad de la microrred DC ante diferentes condiciones operativas y de carga, con el fin de conocer los eventos más críticos.
2.7.1 Desviación máxima de voltaje
La desviación máxima de voltaje (V dm ) representa el valor más alto que alcanza la tensión ante un evento transitorio en condiciones anormales del sistema. Este indicador se puede calcular como se muestra en (12).

donde, n es el número de eventos, V mf es el voltaje máximo, V nf es el voltaje nominal.
2.7.2 Tiempo de oscilación
El tiempo de oscilación (T osc ) hace referencia al tiempo máximo que le toma al sistema volver a estabilizarse cuando se presenta un fenómeno transitorio imprevisto. Este indicador se puede calcular como se muestra en (13).

donde, n es el número de eventos, t ff es el tiempo final de la oscilación, t if es el tiempo inicial de la oscilación.
3. RESULTADOS Y DISCUSIÓN
Se realizó un análisis del modelo de la microrred DC en Matlab/Simulink, ver Figura 7. Esta microrred consta de una planta de generación solar de 19,2 kW, una planta de generación eólica de 11 kW, un arreglo de baterías de 24 V de 100 Ah, además la microrred cuenta con conexión directa a la red. La barra DC de la microrred presenta un voltaje de operación de 250 V. Para los análisis, se consideró una carga variable entre 3,9 kW a 62,5 kW. En las simulaciones se utilizó el método numérico de integración de Runge Kutta de orden cuatro y se consideró un tiempo de simulación de 10 segundos para condición operativa. En la Figura 7 se presenta la microrred DC modelada en Matlab/Simulink, dicha microrred se plantea construir en un laboratorio de la institución a pequeña escala. La microrred tendrá un único nodo DC donde se conectarán todos los elementos. Por las características constructivas que tendrá la microrred DC se despreció en el análisis las pérdidas y la longitud de los conductores. Comparado con los resultados presentados en [12] en este análisis se implementó un modelo detallado del comportamiento del estado de carga de los vehículos eléctricos que permite medir el impacto de penetración de manera más precisa. También se utilizada un modelo mejorado para la representación de vehículos eléctricos que puede entregar mejores resultados comparado con los análisis realizados en [16] y [18]. Comparado con [16] este trabajo utiliza un control basado en comunicaciones que permite un mejer desempeño de la microrred. Finalmente, la microrred DC diseñada en este trabajo presenta una gran variedad de recursos distribuidos mejorando lo presentada en [13], [15] y [19], donde no se consideran recursos eólicos.

Las simulaciones que se llevaron a cabo determinaron el comportamiento de la microrred DC ante diferentes escenarios de incorporación de vehículos eléctricos y de condiciones operativas. En las condiciones operativas, se varió tanto los valores de generación, como los valores de carga. Al realizar las simulaciones de la microrred DC, se tuvieron en cuenta los siguientes 3 escenarios de incorporación de vehículos eléctricos:
Escenario 0: Sin vehículos conectados en la microrred
Escenario 1: 1 vehículo conectado a la microrred (7,5 kW)
Escenario 2: 2 vehículos conectados a la microrred (15 kW)
Para cada escenario de incorporación de vehículos eléctricos, se evaluaron 42 condiciones operativas diferentes, en donde se modificó la generación y las cargas de la microrred DC para conocer los momentos críticos de la red. En total se evaluaron 126 condiciones operativas de la microrred. Se utilizó la nomenclatura que se presenta a continuación AABBCCDEE para identificar la condición operativa evaluada. A continuación, se tiene el significado de cada letra y su orden en cada simulación presentada en los resultados.
AA: Tiempo activo de la red externa, puede estar desconectada (00) o puede estar conectada todo el tiempo (10) o puede estar conectada parcialmente (entre 00 y 10) - Rango: 00-10 segundos.
BB: Tiempo activo de la generación con paneles solares, pueden estar desconectados (00) o pueden estar conectados todo el tiempo (10) o pueden estar conectados parcialmente (entre 00 y 10) - Rango:00-10 segundos.
CC: Tiempo activo de generación eólica, puede estar desconectada (00) o puede estar conectada todo el tiempo (10) o puede estar conectada parcialmente (entre 00 y 10) - Rango: 00-10 segundos.
D: Numero de vehículos en la red.
EE: Valor de resistencia de la carga que no representa vehículos eléctricos - Rango: 01-16 ohms.
En la Tabla 5 se muestran unos ejemplos de la nomenclatura de 3 condiciones operativas para cada escenario de incorporación de vehículos eléctricos. Para el escenario 0, condición operativa 1, la codificación que se presenta en la Tabla 5 indica que la red externa, la planta solar y la planta eólica estuvieron conectadas durante los 10 segundos de la simulación, además se consideraron 0 vehículos eléctricos y una carga resistiva de 2 ohms. Para los escenarios 1 y 2, condición operativa 1, se tienen las mismas condiciones que en el escenario 0, pero se considera 1 y 2 vehículos respectivamente. Para el escenario 0, condición operativa 2, la codificación que presenta la Tabla 5, hace referencia a que la red externa estuvo desconectada durante toda la simulación y la planta de generación solar y eólica estuvieron activadas los 10 segundos de la simulación, considerando 0 vehículos en la red y 2 ohms de carga resistiva. Para los escenarios 1 y 2, condición operativa 2, se tienen las mismas condiciones que en el escenario 0, pero se considera 1 y 2 vehículos respectivamente. Para el escenario 0, condición operativa 3, la codificación que presenta la Tabla 5, hace referencia a que la red externa, la planta de generación solar y eólica estuvieron activadas 5 segundos de la simulación, considerando 0 vehículos en la red y 2 ohms de carga resistiva. Para el escenario 1 y 2, condición operativa 3, se tienen las mismas condiciones que en el escenario 0, pero se considera 1 y 2 vehículos respectivamente.

De las 126 condiciones operativas de la microrred analizadas se encontró algunos escenarios donde la microrred presenta dificultades en su operación. En el caso del escenario 0 se evaluaron 42 condiciones operativas, en 25 la microrred presente un compartiendo correcto y en 17 operó con dificultades. En el escenario 1 también se evaluaron 42 condiciones operativas, en 39 la microrred presente un compartiendo correcto y en 3 opero con dificultades. Finalmente, en el escenario 2 de las 42 condiciones evaluadas, en 38 la microrred presente un compartiendo correcto y en 4 opera con dificultades. En la Tabla 6 se presenta un análisis de los escenarios.

El escenario 0 fue donde existió más dificultades en la operación de la microrred, principalmente en los escenarios de baja demanda donde el voltaje tienda a aumentar en la barra DC por fuera de los límites normales permitidos. En conclusión, la microrred DC es estable siempre y cuando se cumplan 2 condiciones: La primera, es que todos los elementos de generación estén entregando energía a la microrred y la segunda es que exista un valor de carga mínima para alimentar.
Por el contrario, en los escenarios 1 y 2 se presentan dificultades en la operación de la microrred principalmente en los escenarios de alta demanda donde el voltaje de la barra DC tiende a caer por fuera de los límites normales permitidos. En algunas condiciones operativas de alta demanda la incorporación de vehículos eléctricos implica un riesgo para la operación de la microrred. Para mitigar este riesgo es necesario cargar los vehículos eléctricos principalmente en condiciones de baja y media demanda. A continuación, se presenta algunos de los resultados más relevantes del análisis implementado:
En las Figuras 8 a Figura 13 se presentan algunos de los resultados más destacados del análisis, en estas figuras se muestra el voltaje AC del punto de conexión con la red externa, el voltaje de la batería, la corriente y el voltaje de la barra DC, y la potencia consumida. En dichas graficas se presentan la convención 0 VE, 1 VE, 2 VE, esto representa el número de vehículos eléctricos que se tuvieron en cuenta esa curva, pueden ser: cero (escenario 0), uno (escenario 1), o dos (escenario 2) vehículos eléctricos, respectivamente.



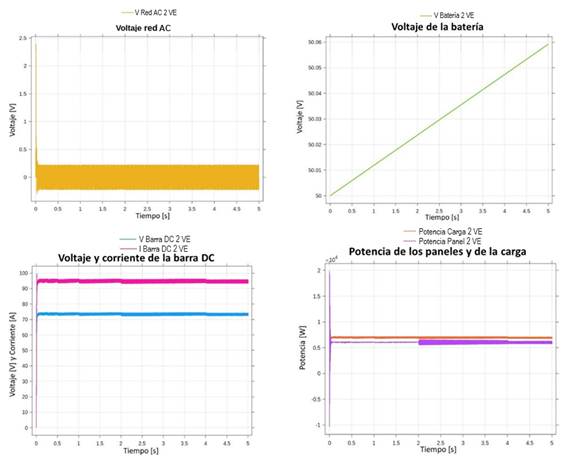


En la Figura 8, se presenta una condición operativa donde se considera que la microrred está conectada a la red externa y la generación solar y eólica están operando con normalidad. Cuando se tiene una generación simultánea, a medida que ingresa carga a la microrred, la potencia de la generación de la red eléctrica aumenta considerablemente. Como se muestra en la Figura 8, a medida que ingresan vehículos, la red eléctrica empieza a suministrar mayor potencia para suplir esa carga. Lo anterior ocurre ya que la generación solar y eólica no son capaces de mantener la estabilidad en la red cuando aumenta la cantidad de vehículos eléctricos conectados a la microrred, por lo que, para suplir esta demanda adicional, se ve la necesidad de aumentar la entrada de energía por parte de la red eléctrica. Como se ven en la Figura 8, la red externa no está entregando tanta potencia cuando hay un vehículo eléctrico como cuando existen 2 vehículos en la red que es donde existe una mayor demanda debido a la incorporación de los vehículos eléctricos.
En la Figura 9, se presenta una condición operativa donde se considera que la microrred está desconectada de la red externa y la generación solar y eólica están operando. En la Figura 8 se evidencia que al desconectarse de la red principal la generación eólica y solar son capaces de suplir las cargas que demanda la microrred. Pero a medida que aumenta la potencia de la carga debido a la incorporación de los vehículos eléctricos, el voltaje en la barra DC baja, disminuyendo la potencia que se entrega a la carga. Con la entrada de los vehículos eléctricos a la microrred, aumenta considerablemente la potencia demandada, por lo que el voltaje de la barra DC cae, ocasionando una pérdida de potencian en las cargas conectadas a la microrred.
En la Figura 10, se presenta una condición operativa donde se considera inicialmente que la microrred está conectada a la red externa, donde la generación solar y eólica están operando, pero se van desconectando paulatinamente. Para mantener el voltaje en la barra DC de 250V, es necesario que esté activada la red externa o que las plantas de generación eólica y solar estén generando al mismo tiempo. Como se puede ver en la Figura 10, una sola fuente de generación no es capaz de mantener el voltaje de la barra DC constante. Se observa que al momento en el que la generación solar y eólica están encendidas, estas son capaces de mantener el voltaje, pero al dejar el generador eólico solo, el voltaje en la barra cae considerablemente. Para garantizar la estabilidad de la microrred, es necesario que todos los elementos de generación estén activados, para que, en caso de un aumento de vehículos eléctricos conectados a la microrred, esta sea capaz de suplir automáticamente esta demanda, sin sufrir caídas de voltaje.
En la Figura 11 se presenta una condición operativa que considera la generación eólica y solar de manera simultánea sin considerar la red externa. Al incorporar los vehículos eléctricos, se puede notar que el voltaje disminuye por debajo de los valores permitidos. Es necesario que la red eléctrica externa esté siempre conectada para garantizar una correcta operación de la microrred cuando se está en el proceso de carga de los vehículos eléctricos.
En la Figura 12 se presenta una condición operativa que considere solo la generación eólica. Se puede notar que este solo elemento de generación no es capaz de suministrar la carga de los vehículos eléctricos. Se observa en la Figura 12, como cae la potencia que es entregada a la carga cuando solo existe generación eólica. La potencia entregada por el generador eólico no es capaz de satisfacer la carga de los vehículos eléctricos. Al ingresar vehículos a la microrred y solo existe generación eólica, el voltaje de la red cae por fuera de los límites permitidos.
En la Figura 13, se presenta una condición operativa donde se considera inicialmente que la microrred está conectada a la red externa y la generación solar y eólica están operando, pero se van desconectando paulatinamente. Pero al momento de desconectar todos los elementos de generación, las baterías del sistema no son capaces de mantener el voltaje en la barra. Esto quiere decir que cuando no existe generación en el sistema, inmediatamente se detiene el suministro de potencia a la carga. Para que la microrred, sea capaz de alimentar a los vehículos eléctricos, es necesarios que existan elementos de generación activados, ya que las baterías por si solas, no son capaces de mantener el suministro de potencia a los vehículos eléctricos.
Al analizar estos resultados, se puede evidenciar que la microrred DC presenta problemas de operación cuando se cargan de manera simultánea los dos vehículos eléctricos. Para que la microrred opera de manera adecuada en condición de carga de vehículos eléctricos, la microrred debe estar conectada a la red externa.
Se puede notar que a medida que ingresan vehículos al sistema el voltaje en la barra DC cae considerablemente. Por lo que en condiciones operativas donde se requiera cargar los vehículos, es necesario que la microrred esté conectada a la red externa. Estas caídas de voltaje pueden ocasionar daños o malos funcionamientos de algunos equipos de la microrred, por lo que es de vital importancia mantener constante el voltaje de esta barra. También se pudo evidenciar que es necesario tener al menos 2 elementos de generación activados para que la microrred pueda suplir cualquier escenario de carga. De lo contrario el sistema puede colapsar, ocasionando drásticas caídas de voltaje en la barra DC.
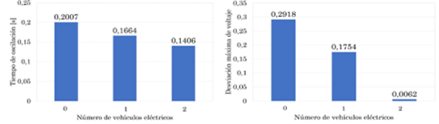
Al conocer todos los resultados, se puede hacer una estimación que permita conocer el nivel de estabilidad que tiene la microrred ante fenómenos transitorios. En la Figura 14 se muestran el tiempo promedio que tarda la microrred en estabilizarse y la variación del voltaje en porcentaje ante estos fenómenos transitorios. La estabilidad de la microrred mejora al aumentar los vehículos conectados, como se ve en la Figura 14, cuando no existen vehículos en la microrred, el voltaje en la barra DC tiende a aumentar, por lo que en escenarios de baja demanda la red puede presentar problemas de operación.
4. CONCLUSIONES
Al realizar las simulaciones de la microrred DC, se pudo evidenciar el comportamiento del sistema ante diferentes escenarios de incorporación de vehículos eléctricos y diferentes condiciones operativas. La estabilidad del sistema fue uno de los criterios más importantes para analizar en el comportamiento dinámico de la microrred.
Los análisis de resultados indican que, para mantener la estabilidad del sistema frente a cambios de carga, es esencial mantener la red eléctrica siempre activa, ya que esta proporciona la potencia necesaria que la microrred no puede suministrar durante picos de alta demanda. Además, la red eléctrica juega un papel crucial en la estabilización del voltaje en la barra DC cuando las cargas aumentan. En consecuencia, para garantizar la estabilidad de la microrred en distintos escenarios operativos y niveles de carga, la interconexión con la red eléctrica resulta fundamental.
De las 126 condiciones operativas de la microrred analizadas, se identificaron ciertos escenarios en los que la operación de la microrred encuentra problemas. En el caso del escenario 0 se analizaron 42 condiciones operativas; en 25 de ellas, lo que equivale al l9,8 % de las condiciones operativas evaluadas, la microrred funcionó adecuadamente mientras que en 17 enfrentó dificultades, lo que equivale al 13,49 %. En el escenario 1, también se consideraron 42 condiciones operativas; en 39 de ellas, lo que equivale al 30,95 %, la microrred operó sin problemas mientras que en 3 tuvo dificultades, lo que equivale al 2,38 %. Por último, en el escenario 2, de las 42 condiciones evaluadas, en 38 la microrred operó sin inconvenientes, lo que representa el 30,15 % y en 4 presentó dificultades, lo que equivale el 3,17 %. En total, 80,96 % de las condiciones operativas la microrred operó de manera adecuada y en 19,04 % operó de con problemas.

