











 Spanish (pdf)
Spanish (pdf)
 Article in xml format
Article in xml format Article references
Article references
 Send this article by e-mail
Send this article by e-mail Cited by SciELO
Cited by SciELO  Cited by Google
Cited by Google  Similars in
SciELO
Similars in
SciELO  Similars in Google
Similars in Google 
 Permalink
Permalink1. Introducción
El mecanismo de Stephenson, conocido con en este nombre en honor a su inventor, es un mecanismo más complejo y complicado de analizar, si se le compara con un mecanismo de cuatro barras o uno de Watt [1]. Aunque este mecanismo ha sido menos estudiado que el mecanismo de cuatro barras, actualmente se encuentra un número considerable de trabajos sobre su modelaje matemático y computacional, así como de sus aplicaciones. Dentro de estas publicaciones, en las últimas dos décadas se puede destacar, el trabajo de Dewen Jin et al [2], donde se propone un método de diseño óptimo de un mecanismo de seis barras de Stephenson para una prótesis de miembro inferior, analizando sus ventajas, tanto del punto de vista cinemático, como dinámico. El trabajo de A. Hernández et al. [3], donde se describe un método geométrico iterativo para la solución de la cinemática de posición de mecanismos planos con pares rotativos, en los que se incluye el mecanismo de Stephenson. Wen-Yeuan en [4], trata un mecanismo de Stephenson como un mecanismo de cuatro barras o como un mecanismo de cinco barras con único circuito, para identificar la condición de rama. El concepto de relación geométrica o el hecho del determinante de la matriz jacobiana ser cero, fue propuesto para discutir las condiciones límites de la barra de entrada. También, Ana de Juan et al [5], presentan la aplicación informática DISMEC, desarrollada en el entorno MATLAB®, para el diseño cinemático de mecanismos. Esta aplicación es un complemento docente en la asignatura de Cinemática y Dinámica de Máquinas impartida en el plan de estudios de Ingeniero Industrial de la Universidad de Cantabria. Aquí el alumno puede seleccionar un mecanismo de la librería predefinida y definir la geometría y los parámetros de entrada del mismo. Los resultados se muestran de una forma gráfica, y mediante animaciones se consigue simular el movimiento real que tendría el mecanismo. La importancia de este trabajo es que se puede analizar casi cualquier mecanismo, ya que las soluciones son conseguidas de forma numérica, lo que hace posible tratar el problema de síntesis de trayectoria de un mecanismo de Stephenson tipo I en un menor grado de dificultad, consiguiendo una trayectoria aproximadamente recta para cinco puntos de precisión. En Mark M et al. [6], proponen un método para la síntesis de trayectoria con once puntos de precisión, en un mecanismo de Stephenson, donde las ecuaciones que describen matemáticamente la cinemática del mecanismo, están basadas en la condición de cierre de lazo vectorial. Allí el mecanismo tiene como aplicación la generación de la trayectoria de un pie para la marcha de un cuadrúpedo, como se muestra en la Fig. 1. También Mark M. et al [7], proponen un procedimiento para el problema de la síntesis de generación de función para un mecanismo de Stephenson, convirtiendo dicho problema en la solución de un polinomio.
El modelaje de mecanismos utilizando coordenadas naturales fue introducido primeramente por Jalón y Bayo [8], las cuales son en su mayoría coordenadas cartesianas, ubicadas

Fuente: Tomado de [6].
Figura 1 Mecanismos de Stepheson I y II de izquierda a derecha, generadores de trayectoria de marcha de cuadrúpedo.
en los pares cinemáticos o en puntos de interés. La ventaja de las coordenadas naturales es que se prescinde del uso de parámetros angulares, evitando con ello la utilización de funciones trigonométricas. Neider Nadid en [9], utilizo coordenadas naturales para el problema de síntesis de posición de mecanismos de dirección de vehículos. En este trabajo se hizo uso del método de Newton-Raphson para solucionar las ecuaciones de forma iterativa. Además, Neider Nadid en [10], utilizó las coordenadas naturales para resolver, de forma analítica, el problema de síntesis de posición de un mecanismo de cuatro barras. Mauro et al, en [11], utilizaron las coordenadas naturales para generar un modelo de optimización de mecanismos, incluyendo entre estos el mecanismo de Stephenson.
En el presente trabajo se hace uso de las coordenadas naturales, para el análisis de posición de un mecanismo de Stephenson I. Las ecuaciones que definen la posición de cada elemento han sido obtenidas de forma analítica, por lo tanto, las soluciones de las mismas son cerradas. Finalmente, las ecuaciones obtenidas fueron implementadas en MATLAB®, con el fin de realizar las simulaciones de las diferentes configuraciones del mecanismo de Stephenson I.
Cabe destacar que el uso del método de las coordenadas naturales es relativamente nuevo, y por ende poco conocido en la comunidad académica dedicada a la teoría de mecanismos
2. Modelamiento usando coordenadas naturales
La Fig. 2 muestra un mecanismo de Stephenson I, modelado con coordenadas naturales, donde el vector de coordenadas naturales es,

y el vector de las variables dimensionales que define la geometría del mecanismo es dado por:

El punto C es dado por

donde 𝜑 es el parámetro de entrada.
El método para determinar el resto de coordenadas naturales, se basado en la triangulación, que en este caso consiste en dado dos puntos y dos distancias diferentes a los de los puntos dados, hallar el tercer punto del triángulo. Un método similar llamado bilateración es propuesto por Nicolás


Rojas [12], el cual es enfocado en la solución numérica del problema de posición. El método también es similar al utilizado en el sistema de posicionamiento global GPS, donde se necesita un mínimo de tres satélites para calcular la posición de un punto en la tierra.
Para el triángulo ⊿ 𝐴𝐶𝐷 que se muestra en la Fig. 3,
se tiene que

donde se obtiene

de forma similar para el triángulo ⊿ 𝐵𝐶𝐸, se puede escribir

obteniendo

luego para el triángulo ⊿ 𝐵𝐸𝐹, se escribe que

para el triángulo ⊿ 𝐷𝐹𝐺, se tiene

donde se obtiene

finalmente, para el triángulo ⊿ 𝐷𝐺𝑃, se tiene que

El vector de coordenadas naturales 𝑞 se puede escribir como:

Los valores de  son 1 o -1, lo que significa que cada triángulo tiene dos configuraciones y, por lo tanto, el mecanismo tiene 32 configuraciones en total. Las configuraciones se pueden agrupar en una matriz de configuraciones 𝑇 ec. (9), donde cada fila representa la configuración 𝑇 𝑖 y las columnas de 𝑇 𝑖 son los valores de 𝑡 𝑗 .
son 1 o -1, lo que significa que cada triángulo tiene dos configuraciones y, por lo tanto, el mecanismo tiene 32 configuraciones en total. Las configuraciones se pueden agrupar en una matriz de configuraciones 𝑇 ec. (9), donde cada fila representa la configuración 𝑇 𝑖 y las columnas de 𝑇 𝑖 son los valores de 𝑡 𝑗 .
Por ejemplo, la configuración,
 , significa que:
, significa que:

3. Resultados
Las ecuaciones obtenidas fueron implementadas en el software numérico MATLAB ® , para un mecanismo de Stephenson I con las siguientes dimensiones:

De la Fig. 4 a la Fig. 13 se muestran las 10 primeras configuraciones del mecanismo de Stephenson I. En las cuales se puede observar que cada configuración es sustancialmente diferente de las otras.







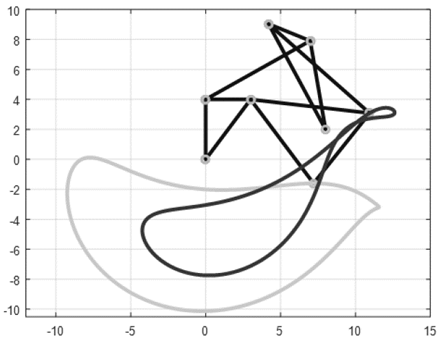


Las curvas trazadas por el mecanismo corresponden al punto 𝐺 y al punto 𝑃, teniendo en cuenta que el punto 𝑃 tiende al punto 𝐺 cuando la distancia 𝑘 se hace considerablemente pequeña. Estas curvas son más complejas que en el mecanismo de cuatro barras, ya que el número de variables que definen la geometría es mucho mayor.
4. Conclusiones
En este artículo se hizo uso de las coordenadas naturales para resolver el problema de posición de un mecanismo de Stephenson I de forma analítica, evidenciándose que las ecuaciones obtenidas son simples y de fácil implantación en una computadora. Además, se definió una matriz de configuraciones que contiene los 32 modos posibles de ensamble del mecanismo. También se evidencia el potencial que tienen las coordenadas naturales en el modelaje de mecanismos complejos, ya que la determinación de los puntos del mecanismo está basada en la triangulación y no en ecuaciones de cierre de lazo que implican el uso ángulos y de identidades trigonométricas para la deducción de las ecuaciones.
En las Figs. 4 a 13 se muestran las trayectorias de puntos del acoplador para las primeras diez configuraciones, evidenciando que las trayectorias son más complejas que las trazadas por un mecanismo de cuatro barras.
Por último, cabe destacar que solución analítica de problemas de posición usando coordenadas naturales abre una nueva línea de investigación en la teoría de mecanismos, y se puede decir que esto es un desarrollo de lo que puede llamarse escuela Iberoamérica de teoría de mecanismos.

