











 Spanish (pdf)
Spanish (pdf)
 Article in xml format
Article in xml format Article references
Article references
 Send this article by e-mail
Send this article by e-mail Cited by SciELO
Cited by SciELO  Cited by Google
Cited by Google  Similars in
SciELO
Similars in
SciELO  Similars in Google
Similars in Google 
 Permalink
Permalink1. INTRODUCCIÓN
Las extremidades representan para los humanos una herramienta vital y sofisticada que involucra el uso de fuerza, habilidades de coordinación y movimientos para el desarrollo de múltiples actividades a lo largo de la vida 1. Las puntas de los dedos son las extensiones terminales de la mano y son las partes que se lesionan con más frecuencia en la extremidad superior 2, de hecho, las fracturas de las falanges y metacarpo representan el 10% de las fracturas de esta extremidad.
Las fracturas de la mano y el dedo constituyen hasta un tercio de las fracturas que ocurren durante una competición atlética en un colegio, los adolescentes entre 10 a 19 años presentan facturas relacionadas a los deportes con un predominio del género masculino del 87% vs un 13% en el femenino y las más comunes ocurren en las falanges del dedo (28,7%), radio distal, cúbito (23,0%) y los metacarpianos (12,7%) 3, las causas de estas lesiones son variadas e incluyen aplastamientos, accidentes deportivos, y juegos como el balonmano 4, baloncesto 5, voleibol 6, 7, entre otras.
Los dedos donde predominan las facturas son el primero (28,7%) y el quinto (33%) por ser los más desprotegidos 8. En estas lesiones es usual durante el tratamiento utilizar una férula de soporte para ayudar a prevenir una lesión posterior y aliviar los síntomas. En las fracturas de falanges se debe inmovilizar el menor número de articulaciones posibles, permitir la completa movilidad del resto e inmovilizar en la posición en que las estructuras capsulares estén en máxima distensión para evitar la posterior rigidez 9.
El tratamiento de fisioterapia inicia luego de la intervención quirúrgica o tiempo de inmovilización, cambiando el yeso y realizando ejercicios que generalmente deben ser muy suaves y prolongados en el tiempo 10. En general, el tratamiento terapéutico está basado en la experiencia de un experto en salud 11 e incluye terapias de rehabilitación de los dedos de la mano, en las que se hacen ejercicios que implican esfuerzo y movimiento con el fin de mejorar ciertas funciones, empleando para ello la fuerza y la resistencia muscular. La fuerza aplicada durante las terapias de rehabilitación de dedos es de gran importancia para los pacientes al momento de realizar el ejercicio, así como la detección y medición de cambios en la fuerza, que son valorados en una escala de seis niveles 12, sin embargo, la valoración de la fuerza aplicada por los pacientes varía de especialista a especialista.
Existen dispositivos que miden la fuerza 12-16, orientados principalmente a aplicaciones robóticas más que técnicas de rehabilitación, también se encuentran herramientas enfocadas en el desarrollo de entornos interactivos, orientadas en el tratamiento terapéutico basado en la identificación de las características del paciente y el diagnóstico médico, permitiendo determinar las prácticas que el sujeto en cuestión necesita hacer 17, sin embargo, la medición de cambios de la fuerza del paciente es una estrategia que requiere continuar siendo explorada, por tanto, el objetivo de este trabajo es diseñar una férula posicional de reposo y un dispositivo electrónico que proporcionen información sobre la fuerza aplicada durante las terapias realizadas a nivel distal de los dedos de la mano, y haga seguimiento a la terapia de rehabilitación del paciente para apoyar el trabajo hecho por profesionales especializados en esta área.
2. DISEÑO DEL DISPOSITIVO
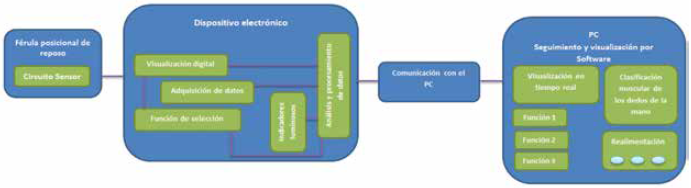
El elemento funcional del dispositivo se organiza en subsistemas físicos, esquema conocido como arquitectura estructural, cuyas partes se presentan en la Fig. 1 e incluyen, primero, el diseño de la férula posicional de reposo para la mano derecha y mano izquierda; segundo, el diseño del dispositivo electrónico y, finalmente, la interfaz gráfica que permite la visualización y el seguimiento en tiempo real a través del computador.
2.1 Férula posicional de reposo
La ergonomía busca mayor comodidad y desempeño, para mejor rendimiento en las actividades que realiza el hombre. En este ámbito la antropometría adquiere gran importancia, considerando que proporciona información relevante de lo que se quiere diseñar 18.
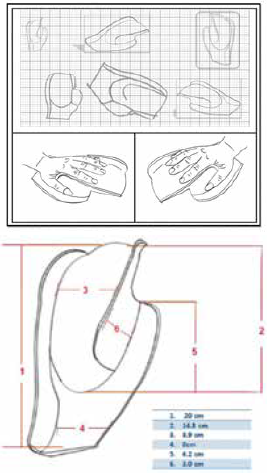
Los requerimientos para el diseño de la férula se realizaron considerando diferentes medidas antropométricas para un percentil 95 19-21; cuyos promedios corresponde con las siguientes medidas antropométricas: ancho palmar (8.9 cm), largo total de la férula (20 cm), contorno de la muñeca (18 cm), ancho del dedo pulgar (2.5 cm), longitud del dedo pulgar (5.2 cm), largo total de la mano (19.8 cm), largo de la palma de la mano (10.3 cm). La férula posicional de reposo debe permitir el descanso de la mano, se extiende desde la punta de los dedos hasta la muñeca. La muñeca se coloca en ligera dorsiflexión, con los dedos en ligera flexión y el pulgar abducido y opuesto a los dedos (posición de reposo).
Se hizo un boceto conceptual, considerando la complejidad de la geometría de la férula. Esta se fabricó primero de manera artesanal y luego mediante un proceso de ingeniería inversa. Los requerimientos de diseño de la férula incluyen, ser resistente al movimiento de flexión de los dedos, presentar un color que se perciba como un material cálido y propio, que genere tranquilidad y calma. El diseño de la férula debe formar un conjunto o pertenecer a la misma familia del dispositivo, no debe tener orificios donde se almacene polvo, el material debe ser de una superficie suave, fácil de limpiar y táctil. Adicionalmente, se consideraron características como durabilidad, peso, adaptación a la mano del paciente, seguridad y economía.
Con el objetivo de analizar áreas en las cuales el producto podría fallar, o presentar uniones débiles, fallas en la estructura y cumplir con los requisitos mencionados, se realizó el diseño detallado de cada una de las piezas con herramientas de software 3D. A partir de los bocetos se procedió a elaborar el prototipo de la férula en forma artesanal en arcilla para su posterior reconstrucción.
2.1.1 Ingeniería inversa
Para reconstruir la pieza y convertirla en un sólido se digitalizó el modelo CAD 3D. La digitalización consiste en obtener una nube de puntos que representan la superficie del modelo físico de la pieza, el cual permite realizar el análisis de los avances del modelo en 3D y su construcción 22. Los elementos que componen el sistema de digitalización son: C-TRACK 780 23, HandyPROBE 23, escáner 3D MetraSCAN 23 y software VX ELEMENTS 23.
En el proceso de digitalización, primero se ubicó el blanco de posicionamiento que son reflectores ópticos con el fin de que el C-TRAK 780 los detecte y establezca el área de trabajo, luego se empleó la máquina HandyPROBE para establecer el sistema de coordenadas de la férula, a continuación con el escáner 3D MetraSCAN se realizó el proceso de digitalización de la superficie, instaurando sus características geométricas, la distancia entre la férula y, por último, en el Software VXelements se visualizó en tiempo real la digitalización y la forma de la superficie como se aprecia en la Fig. 2.

Se identificó el porcentaje de daño y ciclo de vida de la férula, mediante la caracterización de las zonas críticas y el grado de seguridad de la pieza, empleando el software CATIA V5 y SOLIDWORKS Simulation.
2.2 Dispositivo electrónico
El dispositivo electrónico permite la adquisición de la señal de un dedo a la vez en movimiento de flexión. Los valores de voltaje son directamente proporcionales a la fuerza aplicada, es decir, va aumentando su valor a medida que se aumenta el valor del peso que se aplica al sensor, esta proporcionalidad es asegurada debido a la linealidad del sensor. El dispositivo además de indicar la fuerza promedio y la fuerza máxima, también cuenta con led´s que indican el nivel de fuerza ejercido por el usuario sobre la férula, lo que permite retroalimentar al usuario. Así mismo, el valor de la fuerza aplicada se envía al PC que permite a través de la interfaz gráfica visualizar la captura de datos en tiempo real de los dedos de la mano y evaluar el resultado de las terapias aplicadas (Fig. 1).
La selección de sensor adecuado es importante para que los movimientos se asemejen al movimiento normal de la mano. El proceso de selección considera los siguientes aspectos: el rango, la respuesta, la sensibilidad, la precisión y la condición medio ambiente 24. Con base en lo anterior se utilizó el sensor FlexiForce A201, el cual varía su resistencia según la presión ejercida sobre su área sensible; a mayor fuerza menor resistencia; cuando el sensor de fuerza está sin carga, su resistencia es muy alta y por tanto la curva de conductancia es lineal 25-26. El modelo de sensor empleado es A201-25, cuyo rango de medición de fuerza es de 0 a 25 lb (111 N), permitiendo medir la fuerza que realiza el dedo, Fig. 3.

Fuente: Sensor A201 25. Curva de caracterización: Elaboración propia.
Fig. 3 SENSOR DE FUERZA FLEXIFORCE A201 Y CURVA DE CARACTERIZACIÓN.
El sensor fue calibrado con 10 muestras diferentes de pesos conocidos, y se efectuó un ajuste por el método de mínimos cuadrados obteniendo una expresión lineal (1), que describe el comportamiento del sensor, como se aprecia en la Fig. 3b.
 (1)
(1)
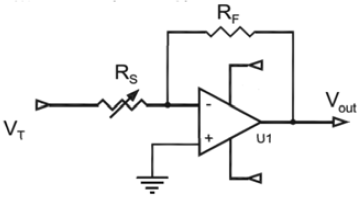
De la curva de caracterización del sensor se determinó la sensibilidad para el sensor (2). Siguiendo la recomendación del fabricante se debe acondicionar el sensor con el circuito mostrado en la Fig. 4, en este caso el valor 1/R s varía linealmente con respecto a la fuerza aplicada sobre el sensor, donde R s es la resistencia del sensor, dado que la respuesta del sensor es casi lineal y considerando que la fuerza límite aplicada sobre el sensor es de 25 lb (111 N), esta se obtiene en (3). Como condición de diseño se considera V T = V in = -1V y se requiere que el voltaje V out sea 2.5 V cuando se otorgue el valor de 1/R smin , el valor R f se obtiene (4).
 (2)
(2)
 (3)
(3)
 (4)
(4)
En la selección del microcontrolador se consideraron las funciones necesarias para el desarrollo del dispositivo, el costo y el número de pines requeridos presentados en la Tabla I 27. El microcontrolador seleccionado es el MC68HC908AP16 de la familia Freescale, de alto rendimiento y bajo consumo de energía de 8-bits, algunos parámetros claves del microcontrolador se muestran en la Tabla II.
Tabla I PINES USADOS EN EL MICROCONTROLADOR.
| Elemento | Cantidad | Número de pines |
|---|---|---|
| Teclado táctil | 1 | 6 |
| Sensor | 1 | 1 |
| LCD (16x2) | 1 | 10 |
| Buzzer | 1 | 1 |
| Serial | 1 | 4 |
| Led´s | 9 | 11 |
| Cristal | 2 | 2 |
| Total pines | 35 |
Fuente: Los autores.
Tabla II PARÁMETROS DEL MICROCONTROLADOR.
| Parámetro | Valor |
|---|---|
| Flash (bytes) | 16,384 |
| Ram (bytes) | 1,024 |
| Pines | 42 |
| Frecuencia Max. Bus Interno | 8 MHz |
| Módulos Timer | 2 |
| CPU | 8-bit |
| Canales ADC | 8 (10 bits) |
| Puertos entrada/salida | 32 |
| Interfaz | SCI, SPI, I2C |
Fuente: Los autores.
En la etapa de acondicionamiento del sensor FlexiForce® A201 se utilizó el integrado LM358. La etapa de comunicación con el PC permite enviar los datos tomados del microcontrolador, para ello se empleó la tarjeta de circuito de conversión serial, que comunica el prototipo electrónico con el RS232, TTL (UART) y viceversa (TX y RX); la tarjeta se alimenta a 5V.
2.3 Interfaz gráfica
Para la interfaz gráfica se usó el desarrollo ágil, que busca promover el avance a lo largo del ciclo de vida del proyecto minimizando los riesgos durante el progreso en determinados lapsos de tiempo. Se utilizó para el procesamiento de la señal el entorno de programación gráfico LabVIEW (Laboratory Virtual Instrument Engineering Workbench 28-29), debido a su potencial uso en el diseño de sistemas de adquisición de datos, instrumentación y control, por la reducción en tiempo de desarrollo de la aplicación y porque permite desarrollos considerables en la interfaz gráfica y su interacción con el usuario objetivo 30, 31. En el desarrollo de un sistema en tiempo real es importante que el diseño satisfaga la especificación de los requerimientos del usuario; por tanto, se emplean herramientas y técnicas para generar una aplicación potente y fiable. LabVIEW permite programación modular, amigable y con sub-tareas más simples.
3. RESULTADOS
3.1 Férula posicional de reposo
La funcionalidad del producto depende del material, entre otros. El material considera el uso, la estética y la percepción del producto; para garantizar estas condiciones en la férula posicional de reposo, además de la comodidad y utilidad para el paciente, se utilizó el polipropileno, por características que permiten: versatilidad y simultáneamente alta dureza y rigidez.
Los bocetos consideraron los valores promedio de las medidas antropométricas, los requerimientos del boceto y las dimensiones reales de todas las partes. Los bocetos correspondientes a la férula de la mano derecha y de la mano izquierda, se presentan en la Fig. 5.
Luego de la digitalización se realizó la reconstrucción de las imágenes de la férula, utilizando las herramientas de modelado de sólidos y superficies para obtener el modelo CAD.
Con el fin de mantener el diseño en relación con el original dentro de las tolerancias permitidas, se hizo un análisis con el fin de establecer la desviación de la pieza con relación a su superficie original.
3.1.1 Porcentaje de daño y ciclo de vida
La Fig. 6a presenta el porcentaje de daño de la férula por los sucesos de fatiga definidos, el daño mínimo corresponde a un valor del 0.1%, y el daño máximo ocurre en la parte superior de la férula donde se realiza el movimiento de flexión de los dedos de la mano. En la Fig. 6b se muestra el ciclo de vida cuya parte más afectada se aprecia en rojo y se empieza a deteriorar en un intervalo desde los 100 ciclos hasta los 83.430 ciclos de vida (fatiga de bajo ciclo), el ciclo de alta de fatiga ocurre en un millón de ciclos de vida que corresponde a la parte azul de la figura 6.

3.2 Prototipo
El sistema cuenta con una parte analógica en la cual se realizó el acondicionamiento del sensor, y una parte digital en la cual se digitalizó la señal y se envió al PC (Fig. 7). El sistema considera la fuerza con sus unidades de fuerza: Newton (sistema internacional de unidades, SI), y libra fuerza (sistema anglosajón de unidades). El tiempo de la prueba se ajusta en minutos o segundos, después del tiempo de duración de la prueba se desactiva el sensor.
El sistema cuenta con una función de fuerza objetivo, la cual definirá el límite de fuerza que debe realizar el usuario, si se sobrepasa esta fuerza límite se indicará mediante un sonido, adicionalmente el dispositivo cuenta con una visualización dinámica mediante led´s que permiten medir el nivel de intensidad de fuerza realizado por el usuario.
La interfaz gráfica permite visualizar la captura de datos en tiempo real, la fuerza máxima durante la prueba, la fuerza promedio y el conteo que indica el número de veces que se sobrepasó la fuerza objetivo, como se aprecia en la Fig. 7.

4. CONCLUSIONES
Este trabajo planteó el diseño de un sistema portátil de bajo consumo, sencillo, funcional, portátil e innovador, capaz de medir la fuerza a nivel distal de los dedos de la mano y realizar diversas funciones.
Utilizando la técnica de elementos finitos se determinó el lugar en el que existe una mayor posibilidad de ruptura para la férula posicional de reposo, encontrando los mayores esfuerzos en la parte superior de la férula, considerando que es el lugar donde se realiza el movimiento de flexión de los dedos; al adicionarle soporte este mejora considerablemente la durabilidad de la férula.
El dispositivo permite enviar los datos a través de una conexión hacia el PC, para allí procesarlos, visualizar la captura de datos en tiempo real y realizar una clasificación muscular de los dedos de la mano, adicionalmente la prueba se ejecuta independientemente que exista comunicación con el PC, ofreciendo versatilidad al sistema. La aplicación con interfaz gráfica de usuario desarrollada en LabVIEW, provee los medios necesarios para un fácil manejo del sistema. El diseño del dispositivo permite apoyar las terapias físicas a nivel distal de los dedos de la mano, considerando la disminución de variabilidad entre diferentes profesionales, por lo tanto podría convertirse en una herramienta en centros de rehabilitación, así como el desarrollo de las terapias.

