











 Spanish (pdf)
Spanish (pdf)
 Article in xml format
Article in xml format Article references
Article references
 Send this article by e-mail
Send this article by e-mail Cited by SciELO
Cited by SciELO  Cited by Google
Cited by Google  Similars in
SciELO
Similars in
SciELO  Similars in Google
Similars in Google 
 Permalink
Permalink
Introducción
Los sistemas tecnológicos modernos utilizados en la ingeniería biomecánica han tenido gran aplicación durante los últimos años. Estas tecnologías abarcan mecanismos para estudios in vitro de prótesis utilizadas en diferentes tipos de artroplastia, pruebas de ortesis, exoesqueletos e incluso asistentes de rehabilitación. Todos, con el fin de devolver la motilidad y función normal a una articulación del cuerpo humano.
Durante las últimas tres décadas, desde el diseño de la plataforma de rodilla Oxford para pruebas biomecánicas de la rodilla 1, esta articulación ha sido extensamente estudiada en diversas áreas, principalmente en la artroplastia de rodilla. La ventaja de estos sistemas es que se pueden establecer diferentes condiciones de prueba y evaluarlas en el mismo espécimen, i.e., en condiciones bien controladas que no se pueden simular en sujetos vivos. Esto incluye evaluar la cinemática de la rodilla bajo condiciones de carga específicas 2 o millones de ciclos repetitivos 2 de alguna actividad de la rodilla, como lo es el ciclo de marcha. Este tipo de pruebas han sido operadas bajo controladores PID o alguna de sus variantes en desplazamiento y fuerza en trabajos como 3)-(8 por mencionar algunos ejemplos.
En este artículo se presenta un resumen de los principales tipos de controladores utilizados en sistemas biomecánicos de rodilla. El objetivo principal es determinar las características del tipo de variable controlado, el tipo de actuador, la técnica de control utilizada y el tipo de sistema. Aunque existen numerosos estudios y diferentes tipos de sistemas como las órtesis, este trabajo se centra en las plataformas dinámicas de rodilla, ya que existe mención de que algunos controladores tienen aplicación para los sistemas de órtesis y de simulación de rodilla 9.
Como objeto de interés se busca recabar información sobre controladores aplicados a sistemas biomecánicos complejos, donde el estudio de la cinemática y dinámica es de gran importancia, haciendo énfasis en que los controladores convencionales pueden no presentar un buen rendimiento en sistemas potencialmente no lineales o inestables.
Ergo, existe la limitante de que no se puede hacer un estudio comparativo de cuál controlador es el más adecuado para los sistemas biomecánicos de rodilla. Esto, debido a que no hay suficientes estudios documentados de diferentes controladores que hayan sio probados en un mismo dispositivo.
Materiales y métodos
En este estudio se desarrolló una revisión exhaustiva de la literatura a través de bases bibliográficas como IEEE Xplore, ScienceDirect, SpringerLink, SchoolarGoogle y Scopus; de bases de patentes como Google Patents, WIPO y FPO; y de repositorios de tesis de posgrado de diferentes instituciones y catálogos, hojas de especificaciones y patentes de fabricantes de simuladores de rodilla.
En la revisión se definieron parámetros como la estrategia de control, la variable controlada, el tipo y la cantidad de los actuadores y el desempeño ante el seguimiento de trayectorias. Por último, se clasificaron los principales tipos de sistemas encontrados, identificando las características principales de cada tipo.
Sistemas de pruebas de remplazo total de rodilla
En un remplazo total de rodilla (TKR, Total Knee Replacement) o artroplastia total de rodilla (TKA, Total Knee Arthroplasty), las superficies desgastadas de la articulación son reemplazadas total o parcialmente por un implante de rodilla 10). Estos implantes han sido probados y evaluados en plataformas como la de Oxford 1 o la de Stanmore 11. El primer tipo involucra un ensamble del tobillo y la cadera, que permite el movimiento de los seis grados de libertad de la rodilla 1, con la desventaja de que puede presentar fallos en pruebas a largo plazo 11. El segundo tipo asume que los componentes femoral y tibial se mantienen fijos y restringidos, considerando que la flexión-extensión simule cualquier actividad requerida. Además, se anticipa que cada prueba pueda ser realizada hasta por 30 millones de ciclos 11.
Modelos basados en la configuración Oxford
La plataforma original de rodilla de Oxford (OKR, Oxford Knee Rig) fue desarrollada en 1978 por 12 y usada para el estudio de varias artroplastias de rodilla. Esta consiste en un ensamble de “cadera” y “tobillo”, los cuales se combinan para permitir los seis grados de libertad de movimiento de la rodilla.
Este sistema incluye tres rotaciones: flexión-extensión, interna-externa y abducción-aducción; y tres traslaciones: anterior-posterior, medial-lateral y proximal-distal. Solo el ángulo de flexión es controlado directamente; todas las demás rotaciones y traslaciones son gobernadas por una fuerza de tensión que debe ser aplicada simulando el cuádriceps 1, 13. El esquema de este sistema se puede apreciar en la Fig. 1.

Dependiendo de la investigación realizada, algunos modelos como el de Kansas utilizan actuadores servo-hidráulicos 4), (15)-(18 debido a los rápidos movimientos y elevadas cargas requeridas para simular las actividades de la rodilla. En otros casos se utilizan motores a pasos para controlar las cargas de la articulación y generar el ángulo de flexión deseado, e.g., el de McGill University 19 o en el simulador diseñado por McMaster University 5. También se emplean ampliamente los servomotores en actuadores lineales, ya sea para el desplazamiento vertical o para el control de la fuerza del cuádriceps 7),(8),(20)-(23. En los modelos basados en la plataforma de Oxford ha sido utilizado LabVIEW para programar el código del controlador y la interfaz de usuario 5)-(8), (20), (22), (24)-(28. En (3)-8),(15),(17),(18),(20)-(23),(25)-(31 se han implementado controladores Proporcional-Integral-Derivativos (PID) o alguna de sus variantes, (P, PI o PD). De todos los simuladores existentes en la literatura, los más reportados son los de la Universidad de Kansas y la Universidad de Gante.
Simulador de la Universidad de Kansas y Purdue
El dispositivo de Kansas 4, basado en el modelo de Purdue, permite simular las actividades de la rodilla en tiempo real mediante actuadores servo-hidráulicos. Para evaluar los movimientos de la rodilla, existen cinco ejes de control que consisten en tres cargas (traslaciones) y dos torques (rotaciones) 4),(5. Cada eje de control tiene un sensor de posición y fuerza que mide la retroalimentación y opera en cualquier modo, de control o carga. Se utilizó un controlador digital (Instron 8580, Canton, MA) para operar el simulador de rodilla, en el cual se pueden definir perfiles de posición o carga en los cinco ejes de manera simultánea 4), (5), (15), (17), (18.
El sistema utiliza un lazo de control PID 4), (5), (15), (17), (18, donde se muestrea la retroalimentación del lazo de control a 5 KHz. Los comandos y datos entre el controlador y el operador son transferidos a una computadora utilizando el bus de comunicación IEEE 488.2 mediante una interfaz de usuario creada en LabVIEW 5.
En 5, durante las simulaciones, cuando eran operados los actuadores de manera independiente, estos presentaban un excelente seguimiento de sus perfiles correspondientes. Sin embargo, durante las simulaciones dinámicas, existían interacciones entre los actuadores, por lo que se emplearon un acoplamiento cruzado entre la carga vertical y el momento de flexión del tobillo para mejorar la respuesta. Para la sintonización del controlador, se menciona que los valores de las ganancias fueron ajustados individualmente, sin describir el método utilizado. Posteriormente se hicieron pequeños ajustes con base a la retroalimentación durante la simulación de actividades con todos los ejes. Estos ajustes de ganancias fueron determinados de manera experimental durante simulaciones de flexión profunda de la rodilla 5.
En otros trabajos se aplicaron métodos de sintonización mediante algoritmos de programación para obtener los parámetros del controlador 18. Para probar el sistema, se utilizaron una trayectoria senoidal para la flexión y la carga vertical a una frecuencia de 0,3 Hz, incrementada dos y tres veces, para examinar la respuesta bajo diferentes condiciones. También se realizaron pruebas con un perfil del ciclo de marcha a 1 Hz. Mientras que el seguimiento de los perfiles era bueno para actividades relativamente simples y lentas, las simulaciones más complicadas como el ciclo de marcha mostraron un decremento en la precisión de los lazos de control, donde la mayoría de la validación de los perfiles mostraba una tendencia al error del 6% 5. Aunque los componentes del simulador fueron diseñados para soportar el ciclo de marcha a velocidades de hasta 2 Hz y una fuerza de 2400 N, los errores bajo estas condiciones son inaceptables, por lo que se sugiere mejorar el acoplamiento cruzado e incluir la fricción en el modelo.
En otras pruebas se realizaron ángulos de flexión profunda de hasta 120º, encontrando diferencias de 0,5º, 65N, 1,6 %, 0,8 Nm y 17 N para el ángulo de flexión, la carga articular, la carga medial-lateral, el torque interno-externo y la fuerza anteroposterior respectivamente 15), (18.
Simulador de la Universidad de Gante
Este simulador está basado en el modelo Oxford y ha sido modificado varias veces. En su propuesta inicial, se trabajó con el control de la flexión de la rodilla, utilizando un actuador lineal 7. En su siguiente versión, se describieron tres actuadores lineales: uno que simula los cuádriceps y dos que simulan la articulación del tobillo 21)-(23), (25. Chevalier et al. mencionan que controlar las fuerzas y movimientos aplicados en el simulador no es una tarea fácil, por lo cual proponen un control PD aplicado a cada motor para un sistema que se contempla como inestable y multivariable 21), (23.
Chevalier et al. utilizan LabVIEW como interfaz para programar un controlador PID 7), (22), (25)-(27). Aunque no se describe la estrategia de sintonización, las variables controladas son el ángulo del fémur y la fuerza aplicada a los cuádriceps. Para ambos casos se aplicó un perfil sinusoidal, donde el error en el movimiento angular representó menos del 1,5% y los resultados en cuanto a fuerza fueron menores al 3,6% 22.
Arnout et al. utilizan el simulador de Gante actuado por medio de dos motores 13: uno para mover la cadera verticalmente, mientras que el segundo aplica carga a una correa, la cual simula el tendón del cuádriceps y dos fuerzas constantes de 50 N cada una. Mediante resortes, el estudio simula la carga de los isquiotibiales medial y lateral 13. Se menciona que el primer motor genera una flexión controlada entre 30 y 130º en 10 s, mientras que el segundo motor tira el tendón del cuádriceps de tal manera que mantiene una fuerza vertical de 150 N en el tobillo 13.
Usando LabVIEW en el mismo simulador fue desarrollado y probado otro control, subdividido en tres lazos de control independientes, con su respectivo lazo de retroalimentación 25. Los primeros dos lazos controlan la posición horizontal y vertical del tobillo mediante un lazo de control PID. El tercer lazo de control es dedicado a la fuerza del cuádriceps, que depende de la fuerza vertical del tobillo. El algoritmo empleado utiliza un control PID para hacer coincidir la fuerza actual del cuádriceps con su valor objetivo, basándose en la señal de retroalimentación de la fuerza vertical del tobillo. Para evaluar la precisión del lazo de control del tobillo, se utilizó una señal seno y coseno como referencia para los ejes horizontal y vertical respectivamente, donde se obtuvo un error del 0,1% para el movimiento horizontal y 0,2% para el vertical, ambos con un retardo de fase del 0,68 %. Para el caso del control de la fuerza vertical en el tobillo, se puso como objetivo una fuerza constante de 100 N, donde el error permanecía por debajo de los 3,6 N 25.
Como se mencionó anteriormente, el modelo Oxford no fue pensado para movimientos cíclicos, por lo que la universidad de Gante desarrolló nuevas configuraciones para ampliar su funcionabilidad, cambiando el número de actuadores y permitiendo así el estudio de actividades más complejas como el movimiento de bicicleta, utilizado en terapias de rehabilitación 29; y bajar escaleras 25. Chevalier et al. modificaron su simulador hasta utilizar cinco actuadores 26), (27), (29)-(31: un actuador para el cuádriceps, dos actuadores para los isquiotibiales (medial y lateral) y dos para el posicionamiento horizontal y vertical del tobillo 29. A partir de estas configuraciones, el simulador fue considerado como un sistema de múltiples entradas y múltiples salidas (MIMO, Multiple Input, Multiple Output), el cual puede tener fuertes interacciones entre las variables. Si estas últimas no se conocen, el sistema puede ser tratado como múltiples sistemas de una entrada una salida (SISO, Single Input, Single Output) 21.
En la configuración de cinco actuadores se identificaron las interacciones que existen entre las entradas y salidas 29, por lo que se eligió utilizar una estrategia de control desacoplado para contrarrestar esta interacción cruzada e incrementar el desempeño del controlador. Para obtener un desempeño adecuado, las ganancias del controlador PID fueron sintonizadas utilizando la herramienta Frequency Response toolbox (FRtool) de Matlab. Además, en el diseño de los controladores se usaron las siguientes especificaciones: tiempo de asentamiento <0,5 s, porcentaje de sobre impulso de <30% y robustez >0,55. Con estas especificaciones se obtuvieron las ganancias adecuadas para cada controlador, con intervalos de error de ±5% para el posicionamiento horizontal y vertical del tobillo y de la fuerza del cuádriceps, y un error dentro del ±10% para los isquiotibiales medial y lateral 29.
Chevalier et al. probaron una estrategia que incluye control desacoplado con control prealimentado (feedforward control) 31, esta vez con una descripción más detallada entre las interacciones cruzadas entre las variables manipuladas y controladas, comparando el control desacoplado y el no desacoplado y obteniendo un mejor desempeño cuando se usa el primero, que compensa dichas interacciones cruzadas. Los autores también mencionan que, con cada espécimen probado en su simulador, se requieren ganancias específicas, mientras que las estrategias de diseño probadas utilizan parámetros de sintonización que no cambian (31. Para solucionar este problema de ganancias, se propone un mecanismo de “adaptación” en el que se determinan las ganancias en un corto pre-experimento donde el tobillo sigue cierta trayectoria 30.
Conforme han avanzado los estudios en la implementación de controladores, desde un PID a un control desacoplado con feedforward, se ha ido mejorando el desempeño, probando controladores que indican una mejor respuesta ante las problemáticas que se presentan.
Resumen de las principales características de control de simuladores basados en el modelo Oxford
Al ser los simuladores de Gante y Kansas los más reportados en la literatura, la Tabla I resume las características más importantes de estos y otros simuladores. En estos modelos se pueden distinguir varias características comunes: dependiendo de la complejidad de los movimientos, se utilizan de tres a cinco actuadores servo-hidráulicos en los que se controla posición o fuerza, y se utiliza LabVIEW para el desarrollo de la interfaz. En estos simuladores se utilizó principalmente un algoritmo de control PID, al cual se le aplicó una señal de prueba sinusoidal, simulando una flexión completa o una sentadilla, obteniendo errores dentro de un rango del ±10% para las pruebas y resultados reportados.
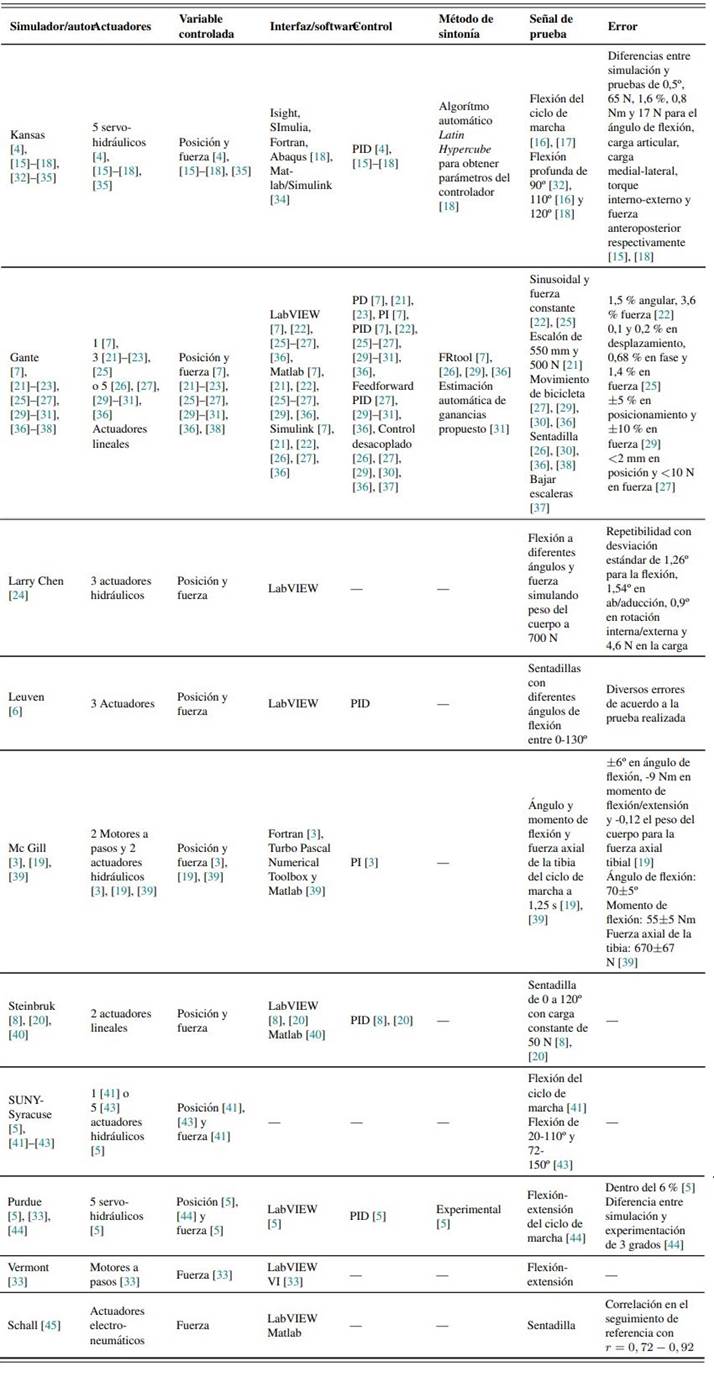
Algo que cabe destacar de estos simuladores y el controlador es que las trayectorias y señales de prueba utilizadas no representan, en su mayoría, un movimiento cotidiano de la rodilla como lo es el ciclo de marcha, sino que se realizan flexiones, principalmente con movimientos sinusoidales a velocidades de ciclo lentas menores a 1 Hz, sometidas a fuerzas constantes, esto debido quizás a la naturaleza de las pruebas biomecánicas para las que fueron hechos los simuladores, donde comúnmente utilizan especímenes de rodilla de cadáveres humanos. Estos, al ser diferentes unos de otros, requieren ganancias específicas en sus controladores o la necesidad de aplicar controladores con mecanismos de adaptación o más avanzados como el feedforward con control desacoplado.
En la siguiente sección se presenta un modelo utilizado para pruebas de prótesis, así como las diferentes características desde su construcción hasta la forma en que se realizan las pruebas biomecánicas.
Simuladores basados en el modelo Stanmore
Este modelo fue diseñado en 1996, en aras de que se pudieran reproducir hasta 30 millones de ciclos en cada prueba, por lo que el simulador debía ser lo suficientemente adaptable para aplicar diferentes condiciones de prueba y su operación debía estar basada en el control de análisis de datos derivados del ciclo de marcha 11. Este dispositivo controla cuatro de los seis grados de libertad de la rodilla mediante actuadores hidráulicos, donde la máquina es capaz de controlar la rotación de la flexión-extensión en el fémur, la fuerza axial en el fémur que produce un desplazamiento axial sin restricciones en su mecanismo, la fuerza anterior-posterior en la tibia que produce un desplazamiento restringido por tejidos blandos, y el momento de la rotación interna-externa de la tibia 11.
La Fig. 2 muestra la disposición mecánica del simulador de rodilla que sigue el sistema de coordenadas establecido por Grood y Suntay 16 para el modo de desplazamientos y rotaciones y el modo de fuerzas y momentos. Este modelo permite una configuración basada en momentos y fuerzas así como una configuración basada en desplazamientos lineales y angulares.

El simulador de Stanmore requiereque el sistema de control sea adaptable a una amplia gama de características de entrada y que posea la capacidad de desarrollar las fuerzas y desplazamientos necesarios para ser aplicados a la rodilla 11.
Adicionalmente se menciona que la elección de actuadores hidráulicos es preferible para la reproducción de trayectorias del ciclo de marcha con altas tasas de cambio. No obstante, si el sistema requiere frecuencias menores a 2 Hz y baja precisión, un sistema neumático podría ser más viable y menos costoso 11.
Aunque en este tipo de simuladores se reportan parámetros de interés específico para el diseño de controladores, se presentan porcentajes de error en cuanto al desempeño del seguimiento de las trayectorias (traking performance) del ciclo de marcha. Existen estudios donde el simulador muestra una buena respuesta ante el seguimiento de los perfiles de fuerza y desplazamiento del ciclo de marcha, con un error promedio RMS de 1,01% para el ángulo de flexión, 2,84% para la fuerza axial, 6,41% para la fuerza anterior-posterior y 3,86% para el torque axial 47.
Otro modelo que trata sobre estudios de control es el AMTI ADL Knee Simulator 48)-(54. En 48), (50), (51 se utiliza un algoritmo de control de aprendizaje iterativo (ILC), reduciendo el tiempo de ajuste del simulador, donde los datos de previas iteraciones son almacenados en la memoria de la computadora y se calcula una nueva señal de control al completar cada ciclo. Este algoritmo reporta errores promedio RMS de 0,5% para la fuerza axial, 0,7% para la flexión, 2,0% para el desplazamiento anteroposterior y 1,7% para el desplazamiento anterior-posterior 48.
Este tipo de mecanismo se ha convertido en uno de los más usados para pruebas de prótesis, por lo que los modelos existentes han sido comercializados y no hay información científica detallada de los mismos. Se pueden encontrar trabajos de los modelos existentes más utilizados, donde se resumen las principales características de rango de carga y desplazamiento, así como de las condiciones de prueba en cuanto a velocidad, temperatura y lubricación 42. En otros casos, las fuentes de información principales son las patentes, páginas de internet y hojas de especificaciones de los fabricantes.
La Tabla II describe los principales modelos y algunas de sus características útiles para el desarrollo e implementación de controladores. En este caso no se muestra la señal de prueba, ya que todos los simuladores de este tipo han sido probados con las trayectorias del ciclo de marcha.

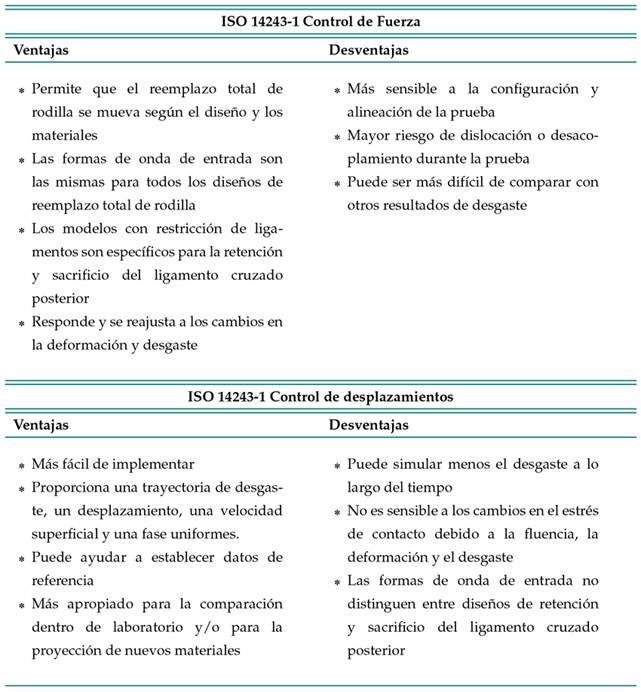
Todos los modelos de la Tabla II han sido comercializados y trabajan bajo estándares o normas como la ISO 14243. La mayoría de los fabricantes no indican los algoritmos de control utilizados para reproducir los movimientos de la rodilla durante el ciclo de marcha. La información de interés que proporcionan es: los tipos de actuadores utilizados, las variables controladas y el error obtenido en la reproducción de los movimientos. Considerando que estos simuladores trabajan bajo una norma, y que esta depende de la variable controlada, se han estudiado las ventajas y desventajas del uso de la norma ISO 14243 para el control de fuerza 71 y el control de desplazamiento 72. Se recomienda utilizar el modo de control de fuerza para los diseños altamente congruentes, constreñidos y con pivote medial, mientras que el modo de control del desplazamiento podría utilizarse para los diseños poco congruentes, poco constreñidos interna o externamente y placas tibiales planas 42. La Tabla III presenta una comparación de la norma ISO 14243-1 para el control de fuerza y la ISO 14243-3 para el control de desplazamiento, donde se observa que la elección de la norma adecuada para el simulador puede ser determinante en el tipo de prótesis diseñada y las pruebas deseadas. En caso de requerir simular movimientos de actividades cotidianas como subir y bajar escaleras, sentarse/pararse y hacer sentadillas, entre otras, es necesario recurrir a normas como la ASTM F3141-17a 73, que muestra diferentes perfiles de carga para pruebas de TKR.
Tabla III Ventajas y desventajas del control de fuerza y desplazamiento para pruebas de implantes de rodilla 74
Discusión
El objetivo general del presente trabajo fue estudiar las diferentes plataformas y modelos de simuladores, enfocándose principalmente en la recopilación de información de controladores aplicados en sistemas biomecánicos de rodilla. La literatura muestra que los simuladores de rodilla son ampliamente utilizados y desarrollados para investigaciones de interés. El principal problema radica en que estos desarrollos quedan como reproducciones basadas en modelos existentes, a los que se les realizan mejoras o adaptaciones necesarias para los estudios requeridos. Tal fue el caso en las variantes del simulador de Oxford.
Las variantes del modelo Oxford se han limitado a la aplicación de controladores tipo PID. La literatura plantea que esto se debe a que los fabricantes de actuadores proporcionan un controlador con tal característica para el control de desplazamiento y/o fuerza mediante algoritmos PID, el cual es suficiente para la reproducción de trayectorias sinusoidales o formas de onda regulares. Sin embargo, cuando se requiere la reproducción de movimientos más complejos como el ciclo de marcha, se ha visto la necesidad de probar técnicas de control avanzadas para la reproducción de dichos movimientos.
El modelo Stanmore y sus variaciones son más utilizados para investigaciones en áreas ortopédicas y tribológicas, entre otras, pues pueden reproducir movimientos más complejos y con mayor precisión que el modelo anterior. Además, estos pueden ser utilizados para pruebas que involucran millones de ciclos, considerando que estos modelos cuentan con condiciones estandarizadas en pruebas de control de fuerza y desplazamiento (ISO 14243-1/3) 71, 72. Dicho modelo tiene la desventaja de que no hay estudios documentados de las estrategias de control utilizadas en estos dispositivos. No obstante, se puede encontrar, en hojas de especificaciones y patentes, una breve descripción de la manera de controlar sus actuadores, con esquemas de control y descripción de algoritmos o algunos de sus parámetros de desempeño, lo cual sugiere similitudes en el tipo de actuadores utilizados, las variables controladas y el error obtenido en la reproducción de movimientos.
Conclusiones
Después de realizar una investigación detallada de la documentación existente, se ha identificado que, aun después de más de treinta años de estudio y aplicación, los sistemas biomecánicos de rodilla no han sido ampliamente reportados en cuanto a sus estrategias de control y/o automatización. Las similitudes y diferencias entre las plataformas revisadas, como las de Oxford y Stanmore, así como los tipos de actuadores involucrados en la reproducción de movimientos en el sistema mecánico, muestran la existencia de un área de oportunidad para proponer nuevas alternativas de diseño y/o estrategias de control para simuladores de rodilla.
En los modelos derivados de Oxford ha sido suficiente aplicar controladores basados en un PID para el tipo de pruebas realizadas, donde los movimientos son simples perfiles sinusoidales o valores constantes. Esto sugiere la posibilidad de estudiar y aplicar métodos de control avanzado para la reproducción de movimientos más complejos de manera cíclica y acelerada, no solo en el modelo Oxford, sino en nuevos desarrollos basados en el modelo Stanmore. Aunque el modelo Stanmore puede reproducir movimientos de actividades cotidianas con controladores avanzados, las estrategias de control que mencionan algunos fabricantes no están reportadas en la literatura. La ausencia de este tipo de información permite vislumbrar un área de estudio enfocada a la aplicación de controladores a sistemas biomecánicos complejos de este tipo, sobre todo considerando el uso de actuadores no hidráulicos.
La necesidad de usar este tipo de simuladores en diferentes tipos de pruebas relacionadas con la articulación de rodilla -o incluso otro tipo de articulaciones- abre un nuevo campo de investigación en el área de control, automatización y mecánica para el desarrollo de nuevas plataformas que cumplan con los intereses de estudio de investigaciones relacionadas con la biomecánica de la rodilla u otras articulaciones.

