











 Spanish (pdf)
Spanish (pdf)
 Article in xml format
Article in xml format Article references
Article references
 Send this article by e-mail
Send this article by e-mail Cited by SciELO
Cited by SciELO  Cited by Google
Cited by Google  Similars in
SciELO
Similars in
SciELO  Similars in Google
Similars in Google 
 Permalink
PermalinkI. INTRODUCCIÓN
En los sistemas de múltiples entradas y múltiples salidas (MEMS) la interacción entre las variables es una de las características que más afectan el diseño y sintonización de lazos de control. Se considera que existe interacción cuando una variable manipulada afecta a una variable controlada que no pertenece al mismo lazo de control.
Los sistemas MEMS que presentan fuerte interacción emplean técnicas de desacoplamiento de variables, cuyo objetivo es lograr que el comportamiento de cada lazo de control sea independiente de los otros lazos [1].
El desempeño del desacoplamiento depende de algunas características del sistema como no linealidades, elevados tiempos muertos, entre otras, que en algunos casos no permiten la implementación del mismo. Algunas veces se emplean técnicas de desacoplamiento que consideran los valores de estado estacionario basándose en la ganancia estática, despreciando el efecto de las características dinámicas. También es posible hacer el desacoplamiento mediante la cancelación de los términos que provocan la interacción, tomando en cuenta información de la respuesta dinámica del sistema [2].
El uso de técnicas de desacoplamiento junto a estrategias de control contribuye a mejorar el desempeño global del sistema multivariable. Desacopladores dinámicos por realimentación de estados en conjunto con compensadores, forman sistemas de control robustos y rechazan el efecto de perturbaciones externas en comparación con el uso de desacopladores basados en ganancias estáticas. Además, el diseño de controladores multivariables descentralizados mejora el rendimiento del sistema control ante dichas perturbaciones, sin embargo, su funcionamiento se limita a las características dinámicas del proceso [3].
Por otro lado, se han establecido criterios y condiciones para diseñar desacopladores basado en realimentación estática de estados para sistemas multivariables lineales. Estas condiciones se presentan en forma de dos matrices reales que permiten el diseño de compensadores para el sistema multivariable desacoplado, además, se hace extensivo para sistemas con realimentación de estados no regulares [4].
En el presente trabajo se estudia el desempeño del sistema multivariable usando técnicas de desacoplamiento basadas en ganancia estática y técnicas basadas en características dinámicas del sistema. Como caso de estudio se presenta un sistema multivariable de dos entradas y dos salidas (2x2) que representa el modelo de primer orden más tiempo muerto (POMTM) de una columna de destilación Wood and Berry [5].
Se evalúa el desempeño de las técnicas de desacoplamiento ante errores de modelaje en las ganancias estáticas (K ij), constantes de tiempo (t ij ) y tiempo muerto (t0ij). Finalmente, se analiza el desempeño de las técnicas desacoplamiento junto a una estrategia de control proporcional, integral y derivativo (PID), probando la robustez del sistema de control ante errores de modelaje en los parámetros del modelo.
II. MARCO TEÓRICO
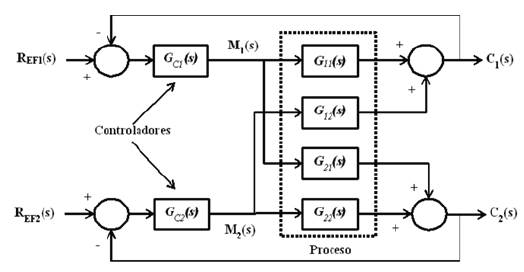
La Fig. 1 muestra el esquema clásico de control multivariable para un sistema de dos entradas y dos salidas (2x2). La interacción entre los lazos de control se representa por las funciones de transferencia G12(s) y G21(s). Los controladores GC1(s) y GC2(s) actúan sobre los lazos directos de control modelados por las funciones de transferencia G11(s) y G22(s). Un cambio en los valores de referencia del sistema de control multivariable REF1(s) y REF2(s) afecta la estabilidad y desempeño de los lazos de control.
La matriz de ganancia relativa (MGR) es un método que permite normalizar las ganancias estáticas (Kij) y medir la interacción entre las variables controladas independientemente de las unidades [6], [7]. La MGR puede calcularse usando solo información del proceso en lazo abierto aplicando el teorema del valor final, para luego calcular el índice de interacción [8], [9]. Esto permite seleccionar como variables manipuladas-controladas aquellas cuyo valor de índice de interacción sea positivo y cercano a la unidad, cuanto más se aleje del valor unitario mayor es la interacción entre las variables [10], [11]. Sin embargo, esta selección no garantiza un buen desempeño del sistema de control debido a las interacciones entre los lazos del sistema [12].
Eliminar la interacción entre las variables controladas puede hacerse mediante el uso de un bloque desacoplador. Los desacopladores descomponen el sistema multivariable en múltiples subsistemas de una variable, permitiendo establecer un sistema de control multivariable con controladores independientes para cada lazo de control [12].
La Fig. 2 muestra el esquema general de un sistema de control multivariable 2x2 con desacoplamiento, y está formado por: el proceso (G(s)), el bloque desacoplador (D(s)) y los controladores (GC(s)). El bloque D(s) permite obtener un sistema diagonal G'(s) donde los controladores actúen de manera independiente, para un sistema 2x2 con desacoplamiento se debe cumplir que:

La matriz D(s) permite eliminar la interacción entre las variables que no pertenecen a un mismo lazo de control, buscando la cancelación de los términos que no pertenecen a la diagonal principal [10]. Sin embargo, existen características que degradan la acción de control y limitan el funcionamiento de los desacopladores, como no linealidades, elevados tiempos muertos entre otros, que hacen necesario realizar consideraciones para que el desacoplador sea realizable [10], [11].

A. Desacopladores Tradicionales
El diseño de desacopladores tradicionalmente se basa en modelos que describen la respuesta transitoria y permanente del sistema multivariable. La matriz de función de transferencia de un proceso multivariable 2x2 para un modelo de primer orden más tiempo muerto (POMTM) puede ser descrita de la siguiente forma:

Donde K representa las ganancias estáticas, Tij las constantes de tiempo y t0ij el tiempo muerto. Usando la ecuación (1) se calcula el bloque D(s) tal que:

Donde:

B. Desacopladores basados en ganancias estáticas (DGE)
Existen casos en donde las dinámicas de orden superior no son un factor determinante en la interacción, por lo que se considera el diseño del bloque desacoplador basándose en los valores de estado estacionario del sistema [13]. El caso de un sistema de control multivariable 2x2, los desacopladores se calculan usando las ganancias estáticas [12]:

C. Desacopladores dinámicos con aproximación del tiempo muerto (DTM)
El uso de tiempo muerto no es recomendable ya que forma parte del lazo de realimentación y disminuye la controlabilidad del lazo realimentado. Una aproximación que permite remover el tiempo muerto y mantener la acción de adelanto total en el desacoplador es [12]:


D. Desacopladores basados en alimentación adelantada (DAA)
Los desacopladores basados en alimentación adelantada (DAA) surgen de transformar la matriz de función de transferencia del sistema multivariable a su forma diagonal, cancelando los términos que producen la interacción haciendo uso de una matriz adicional que tendrá la función de desacoplamiento [2]. La matriz de función de transferencia 2x2 dada por la ecuación (2) se puede transformar en:

Donde:


La matriz Z(s) surge de la acción de transformar la matriz de función de transferencia del proceso G(s) en una aproximación diagonal G'(s), por lo que cada lazo se puede analizar de forma independiente. Una aproximación válida para los términos del tiempo muerto en Z(s) es la expansión por serie de Taylor de primer orden [14]:

En este caso la salida del sistema es representada por:

El vector U(s) representa las variables manipuladas que van a controlar el sistema diagonal G'(s) y vienen dadas por la sintonización de una estrategia de control. Las variables de entrada M(s) al sistema multivariable se obtiene por:

En este caso la matriz que logra el desacoplamiento viene dada por la matriz inversa de Z(s), la cual considera características dinámicas del proceso y la aproximación de tiempo muerto por expansión de serie de Taylor de primer orden. La Fig. 3 muestra el esquema de control multivariable usando desacopladores DAA.

III. METODOLOGÍA
Esta sección describe la metodología empleada para evaluar el desempeño de las técnicas de desacoplamiento usando un esquema de control PID para un sistema multivariable. Como caso de estudio, se utiliza un sistema multivariable 2x2 que describe el modelo POMTM de una columna de destilación metanol-agua Wood and Berry para el producto de tope y el producto de fondo [5]. La función de transferencia del sistema multivariable es la siguiente [15]:

Donde XT(s) y XF(s) representan el porcentaje de las concentraciones de producto de tope y fondo de la columna de destilación, además, M1(s) y M2(s) son los flujos manipulados para controlar la concentración de los productos de la columna.
En primer lugar se calcula la MGR para seleccionar el mejor par de variables manipuladas-controladas. Seguidamente los desacopladores basados en ganancias estáticas (DGE), dinámicos con tiempo muerto (DTM) y de alimentación adelantada (DAA). Se realizan pruebas a lazo abierto en la integración del bloque desacoplador-proceso para cambios del tipo escalón de +10% en las entradas del bloque desacoplador (U1(s) y U2(s)), evaluando el rechazo de las interacciones entre las variables de salida en términos de sobrepaso porcentual (MP(%)) y tiempo de establecimiento (TS) para una tolerancia del 2% [16]. Se introducen errores de modelaje para las ganancias estáticas (K ), constantes de tiempo (t ) y tiempo muerto (t0 ) en un rango de ± 20%, y se analiza el rechazo de las interacciones en términos de Mp(%) y TS.
Finalmente, se muestra el desempeño del sistema de control multivariable PID. Para la sintonización de los controladores (GC1(s) y GC2(s)) se obtiene el modelo POMTM del sistema diagonal G'(s) usando el método de la curva de reacción [12]. Los parámetros de los controladores PID se ajustan por el método de Dhalin para modelos POMTM [12]. Se analiza el rendimiento del sistema de control junto con las técnicas de desacoplamiento para cambios del tipo escalón en +10% del valor de referencia de los productos de tope y fondo, en función de MP(%), TS y los esfuerzos de las señales de control M1(s) y M2(s). Se introducen errores de modelaje en los parámetros K, t y t0ij en un rango de ± 20% y se analiza la respuesta usando el índice de desempeño IAE, debido a que las respuestas de las variables controladas presentan pocas oscilaciones en el régimen transitorio.
IV. RESULTADOS
La Tabla 1 muestra los valores obtenidos para la MGR. Se observa como el sistema presenta alto índice de interacción entre las variables. Según la MGR los mejores pares de variables manipuladas-controladas corresponden a (M1,XT) y (M2,XF), es decir, con la entrada M1 controlar el producto de tope y con la entrada M2 el producto de fondo de la columna de destilación.

Para los desacopladores DGE los términos D12 y D21 de la matriz de desacoplamiento usando la ecuación (5) queda como:

De manera similar para los desacopladores DTM se calculan D12(s) y D21(s) usando las ecuaciones (6) y (7):

La matriz de desacoplamiento por alimentación adelantada Z-1(s) para los DAA se calcula usando las ecuaciones (10) y (11):

La Fig. 4 muestra el desempeño de las técnicas de desacoplamiento para las salidas del producto de tope y fondo. Se observa como los desacopladores DAA reducen la magnitud de la interacción entre las variables de salida considerablemente, mostrando para XT y XF un Mp(%) de 0,003% y 0,02% respectivamente, además, muestran un Ts de aproximadamente 140 min y 150 min para XT y XF. Con el uso de desacopladores DGE se observa mayor Mp(%) de 0,36% y 1,60% para XT y XF respectivamente, sin embargo, Ts se hace menor para XF con valor aproximado de 90 min. Para XT el tiempo aumenta ligeramente a 150 min. Igualmente, el uso de desacopladores DTM aumenta Mp(%) a 0,27% y 2,51% para XT y XF respectivamente.

La Fig. 5 muestra la respuesta de XT para variaciones en las ganancias estáticas (K11 y K12) en un rango de ± 20%. De manera similar la Fig. 6 muestra la salida XF para variaciones en las ganancias estáticas (K21 y K22) en el mismo rango. Para ambos casos se observa que los desacopladores pierden su funcionalidad, por lo que errores de modelaje en estos parámetros comprometen el rendimiento de las técnicas de desacoplamiento. Sin embargo, el uso de DAA desvía en menor magnitud la salida del punto de operación, por lo que el uso de esta técnica junto con estrategias de control puede mejorar el rendimiento global del sistema.


La Fig. 7 muestra el desempeño de las técnicas de desacoplamiento en la salida XT para errores de modelaje en las constantes de tiempo (xn y t12). Se observa como ambas técnicas rechazan el efecto de la interacción, sin embargo, el uso de DGE y DTM aumenta la magnitud de Mp(%) y Ts teniendo un mejor desempeño los DAA. La Fig. 8 muestra un comportamiento similar en la salida XF para errores de modelaje en las constantes de tiempo (t21 y t22).

Figura 8 Producto de fondo XF para variaciones de ± 20% en las constantes de tiempo. (a) t21 (b) t22
La Fig. 9 muestra las salida XT y XF para errores de modelaje en los tiempos muertos (t011, t012, t021, t022) del sistema multivariable. El efecto de estas variaciones en el desempeño de las técnicas de desacoplamiento es poco significativo, manteniendo el comportamiento descrito inicialmente en la Fig. 4. En este sentido se mantiene un mejor desempeño usando DAA logrando menor Mp(%) y Ts.

La Tabla 2 muestra los parámetros del modelo POMTM del sistema diagonal G'(s) usando el método de la curva de reacción, mostrando ganancia estática (K), constante de tiempo (t) y tiempo muerto (t0) [12].

La Tabla 3 muestra los valores para los parámetros de sintonización de controladores PID usando las ecuaciones de Dhalin para la ganancia proporcional (KP), constante de tiempo integral (tí) y constante de tiempo derivativa (rd) [17]. En este caso GC1 representa el controlador para el lazo directo G'11(s), y GC2 el controlador para el lazo directo G'22(s).

La Fig. 10 muestra el desempeño de un esquema de control PID junto con las técnicas de desacoplamiento para cambios de +10% en el valor de referencia, en t=100 min y t=600 min para XT y XF respectivamente.

El uso de controladores PID junto con DAA mejora el desempeño del sistema de control en términos del IAE y Ts, ya que la técnica de desacoplamiento considera mayor información de la dinámica del proceso. Por otro lado, el uso de DGE y DTM reducen el Mp(%) en las variables controladas XT y XF.
En la Tabla 4 se compara el desempeño de los lazos de control en términos de Mp(%), IAE y Ts.

La Fig. 11 muestra el esfuerzo de las señales de control para los cambios del valor de referencia mostrados en la Fig. 10.

El uso de un sistema de control PID junto con las técnicas DGE y DTM, introduce cambios acentuados en las señales de control que afectan el funcionamiento y la vida útil de los elementos finales de control. Este efecto es compensado con el uso de DAA los cuales introducen cambios suaves en las señales de control.
La Tabla 5 muestra el desempeño del sistema de control mulivariable en función del porcentaje de variación del IAE para cambios del punto de operación (ver Fig. 10) y errores de modelaje en los parámetros  . Se observa como el sistema de controljunto con la técnica DAA presenta menores variaciones del IAE, mejorando el rendimiento del sistema de control. Para este caso el rendimiento más pobre se muestra con desacopladores DTM.
. Se observa como el sistema de controljunto con la técnica DAA presenta menores variaciones del IAE, mejorando el rendimiento del sistema de control. Para este caso el rendimiento más pobre se muestra con desacopladores DTM.


V. CONCLUSIONES
El presente trabajo muestra el desempeño de diferentes técnicas de desacoplamiento en sistema multivariables, donde la técnica DGE es de más fácil diseño pero implica variaciones más acentuadas en las variables de salida, presentando mayor Mp(%) en el rechazo de interacciones. Esto puede afectar la vida útil de los elementos finales de control cuando se someten cambios impulsivos continuamente. Por otro lado, el uso de desacopladores DTM y DAA reducen estas variaciones acentuadas en la salida, presentando este último menor Mp(%).
Evaluando errores de modelaje en los parámetros que definen al sistema, se comprueba que variaciones en las ganancias ( ) y constantes de tiempo (
) y constantes de tiempo ( ) son sensibles para el desacoplamiento, perdiendo su funcionalidad para esos errores de modelaje. En cuanto a errores de modelaje en el tiempo muerto (
) son sensibles para el desacoplamiento, perdiendo su funcionalidad para esos errores de modelaje. En cuanto a errores de modelaje en el tiempo muerto ( ), representa un parámetro poco significativo al evaluar el desempeño de las técnicas de desacoplamiento.
), representa un parámetro poco significativo al evaluar el desempeño de las técnicas de desacoplamiento.
Finalmente, para un sistema de control multivariable PID, el desempeño mejora con el uso de DAA, generando señales de control más suaves que no afectan significativamente a los elementos finales de control. En referencia a la robustez del sistema de control ante errores de modelaje, para variaciones de  el uso de DAA consigue obtener menores variaciones del índice de desempeño IAE, siendo la técnica DTM la que presenta rendimiento más pobre. El efecto de variaciones de es poco significativo en el rendimiento del sistema de control.
el uso de DAA consigue obtener menores variaciones del índice de desempeño IAE, siendo la técnica DTM la que presenta rendimiento más pobre. El efecto de variaciones de es poco significativo en el rendimiento del sistema de control.

