











 Español (pdf)
Español (pdf)
 Articulo en XML
Articulo en XML Referencias del artículo
Referencias del artículo
 Enviar articulo por email
Enviar articulo por email Citado por SciELO
Citado por SciELO  Citado por Google
Citado por Google  Similares en
SciELO
Similares en
SciELO  Similares en Google
Similares en Google 
 Permalink
PermalinkI. INTRODUCCIÓN
En un contexto globalizado y con una población creciente, la escasez de alimentos puede llegar a ser un problema latente. Sin embargo, la tecnología surge como una solución para generar una producción más eficiente. En 1920, un 40% de la población trabajaba en labores propias de agricultura en USA. En 1995, solo el 1,8% lo hacía con mejores resultados de producción, gracias a los medios tecnológicos usados, de tal manera que la agricultura de precisión se convierte en elemento necesario para asegurar la eficiencia en los procesos de generación de alimentos, ante la necesidad de cumplir con la expectativa de producir suficiente cantidad de alimentos para cubrir las necesidades de la población del mundo.
Con el avance en la robótica y la integración de sistemas de posicionamiento global, GPS, los agricultores han ganado herramientas que ayudan al conocimiento inmediato de la posición o zonas de interés en sus cultivos, consiguiendo monitorear datos de crecimiento de los mismo, mantenimiento del suelo y factores ambientales, incluso, enviando maquinaria automatizada y pre-programada a ejecutar las tareas [1].
Trabajos reportados como en [2-4], plantean la agricultura de precisión como un global que implica manejo responsable de recursos naturales, variación y cuidado del suelo, uso de tecnologías en el campo para reaccionar en tiempos cortos y de manera controlada, tal que permita minimizar el uso de químicos y maximizar la producción.
Las Naciones Unidas plantean retos para el futuro de la agricultura en el contexto de un mundo libre de hambre y desnutrición. Un estudio realizado por la organización [5] arroja opciones de lo que se debe hacer para satisfacer la demanda en el siglo XXI. En dicho estudio se evidencia que la agricultura ya no se debe ver solo como un negocio, sino que se deben hacer grandes transformaciones en los sistemas agrícolas, integrando las economías rurales y prestando atención al manejo de los recursos naturales. Así, se habla de tener mayor productividad con menor inversión de recurso, donde toman interés los esfuerzos que se hagan en esa dirección. La Unión Europea sigue de cerca estos lineamientos [6].
En tal sentido, la agricultura de precisión se muestra como alternativa para ayudar al agricultor a reaccionar en menos tiempo, mejorar el producto y obtener mayores beneficios económicos. Compañías como Bosch con BoniRob [7], Robotnik con Guardian [8], o Naïo con Oz [9], aportan a la integración de los robot en las diversas labores de la agricultura para lograr estos beneficios. Asimismo, investigaciones con plataformas experimentales como la pública Auat Cheein [10], permiten ver un móvil dedicado a la inspección de cultivos. Bergerman [11] muestra un vehículo automatizado para asistir tareas de árboles frutales, donde por medio de la localización-Landmarks, instrumentación de posicionamiento global y uso de ‘landmarks’, logra desplazar el robot a lo largo del cultivo.
En el caso de Colombia, el crecimiento productivo en materia de hortalizas lo han situado entre los cinco primeros países de América Latina, lo cual significa un reto para los agricultores colombianos de mejorar sus procesos, asegurar mayores producciones y con productos de calidad.
En este contexto y con la experiencia del grupo GIDAM de la Universidad Militar Nueva Granada en proyectos dedicados a la vigilancia con plataformas aéreas desde una perspectiva del control de vuelo [12], tareas de formación de robots [13], incluso, el desarrollo de herramientas para la preparación del suelo, conservación de cultivos [14] y detección de malezas [15], se proyectan trabajos en esta dirección.
Partiendo del desarrollo de una plataforma móvil dedicada a labores de agricultura (ver Fig. 2), dotada de cámaras, actuadores para remover maleza y aplicar fungicidas naturales, y desde la base de la teoría de SLAM, planificación de trayectorias, seguimiento de trayectorias y automatización de procesos, se está realizando la plataforma Ceres_AgroBot, de manera tal que asista las labores de agricultura.
Al respecto, por ejemplo, Pulido [16] presenta técnicas de identificación de la maleza y a partir de estas, la determinación de la posición, lo que habilita la erradicación sin intervención de químicos o la no realización de tareas repetitivas por parte de los agricultores cuando se hace la erradicación manual.
La teoría de planificación de trayectorias permite abordar el desplazamiento de la herramienta actuante para la remoción de la maleza. Se soporta en enfoques clásicos como los descritos por Latombe [17], Laumond [18], o las recientes aplicaciones en la competencia DARPA - con algoritmos RRT [19], y reflejan la conducción urbana inteligente de automóviles. En general, se determina la trayectoria ajustada a los movimientos permitidos por el sistema-robot, contemplando las dinámicas que ellos presentan, sean dinámicas que conduzcan a sistemas holonómicos o no holonómicos.
Por otro lado, las trayectorias encontradas en algunas ocasiones no son aplicables de manera directa, bajo un objetivo de curvas continuas y suaves. Entre las estrategias usadas para mejorar dichas trayectorias, se tiene la teoría de curvas de Bézier.
Dentro del campo de la inteligencia artificial, centrando la atención en la planificación de trayectorias, se encuentran aportes en la literatura. Por ejemplo, Ferguson [20] presenta desarrollos heurísticos en la planificación de trayectorias, donde discute los diferentes enfoques para abordar el desplazamiento de un robot en un mundo real. Chien- Heo and Chung [21] usa RRT para hacer planificación local para un AUV (Autonomous Underwater Vehicle-AUV) y mezcla con algoritmos A* para determinar la trayectoria más corta. Liu Yang [22] se enfoca en la planificación de la trayectoria para un UAV en un entorno 3D dinámico. La planificación del movimiento para un manipulador es presentada por Benevides [23], donde usa algoritmos RRT de base para solucionar.
De acuerdo con estos planteamientos, el presente trabajo tiene por objetivo encontrar la solución para que el sistema de remoción de maleza integrado a la plataforma Ceres_AgroBot, realice la tarea de forma segura. Se presenta la técnica de planificación de trayectorias basada en A*, para determinar el camino por donde se debe desplazar el elemento actuante para la remoción de maleza, y posteriormente, se contempla el alisamiento de las curvas aplicando las técnicas de Bézier.
El artículo se presenta organizado de la siguiente manera: la sección II ofrece una profundización teórica sobre los robots en la agricultura, centrando la atención en la descripción de la plataforma Ceres-Robot (los elementos de locomoción y posibles sistemas embarcados para las labores necesarias). La parte III explica el algoritmo A* y la técnica de Bézier. En la IV se muestran los resultados en simulación y la V presenta las conclusiones y perspectiva del trabajo.
II. LOS ROBOTS EN LA AGRICULTURA - PLATAFORMA CERES-AGROBOT
Diversas compañías y laboratorios de investigación vienen trabajando en vehículos autónomos que embarquen sistemas que ayuden a la agricultura. Ejemplo de esto son las plataformas BoniRob [7], Guardian [8] y Oz [9], así como los móviles acondicionados y presentados por Auat Cheein [10] y Bergerman [11] (ver Fig. 1).

Fig. 1 Plataformas dedicadas a la Agricultura. Fuente: En orden de arriba-izquierda, abajo-derecha [7-11], respectivamente
Los sistemas dedicados a labores autónomas dentro de la agricultura, por lo general cuentan con un sistema de locomoción, sensores de posicionamiento global, sensores de proximidad (ultrasonido, bumpers y/o Laser), centrales inerciales, sistemas de visión, sistemas de comunicación y elementos procesadores de información (computadores, sistemas embebidos, tarjetas de video). Para el caso de Ceres-AgroBot, Fig. 2., este cuenta con una locomoción en configuración diferencial, propulsado por motores eléctricos de 5KW, capacidad para 200Kg de carga en la plataforma, un sistema de visión formado por cámara termográfica, FLIR, cámara estéreo ZED, y cámara multiespectral MicaSense. Cuenta con sensores laser-Hokuyo para revisar los elementos próximos a la plataforma.
A nivel de procesamiento, Ceres AgroBot posee un computador embarcado Quad-Core, sistemas embebidos y tarjeta de procesamiento de imágenes como la Nvidia-Jetson. El robot, igualmente, tiene embarcado un sistema dispensador de nutrientes-compost, plaguicidas y una herramienta para remover maleza, todo dentro de un contexto de un sistema de posicionamiento en el plano cartesiano XYZ, lo que da mayor efectividad sin desperdiciar o afectar partes del cultivo, es decir, un trabajo focalizado. En la etapa de pruebas exploratorias, se cuenta con baterías embarcadas de 48V/15A/h - NiCoMn, que otorgan una autonomía de 30min.
A. Sistema de remoción de maleza
Este elemento consta en su base de un sistema posicionador cartesiano en el espacio 3D, cuyo objetivo es llegar al punto donde se encuentra la maleza y removerla. Cuenta con motores lineales, ubicados sobre el eje x, con recorrido de 1200mm; sobre el eje Y se tienen 900mm de recorrido; y sobre el eje Z cuenta con recorrido de 600mm (ver Fig. 3).

Fig. 2 Plataforma Ceres-AgroBot: dedicado a labores de agricultura sobre plantaciones de hortalizas en la zona sabana-centro (Cundinamarca-Colombia), y dimensionada a los estándares de este tipo de cultivos en zonas planas.
La Fig. 3 muestra tres sistemas coordenados: el de la cámara denominado RC, el del centro de gravedad del sistema RG y el de posición home del sistema XYZ - RT. Estos sistemas coordenados tienen sus desplazamientos entre cada uno de ellos, dados por las transformadas de desplazamiento TGT y TGC, donde las posiciones del sistema coordenado RC con respecto al sistema coordenado RG, son: XGC, YGC, ZGC. Y del sistema coordenado RT a RG, son: XGT, YGT, ZGT. Realizando las transformaciones entre los sistemas coordenados, se determina la ubicación de la herramienta contra el posicionamiento del entorno - vehículo Ceres AgroBot y plantación. Así, se determina la posición a la que debe ir el efector final (elemento herramienta).

B. Modelado del robot y su simulación
La plataforma Ceres-AgroBot, posee un sistema de locomoción diferencial con vectores de fuerza fijos en las ruedas delanteras, asociados a los motores principales, tal como se presenta en la Fig. 4 Igualmente, es una plataforma robot no holonómica, con restricciones dinámicas en sus movimientos. El modelo de la cinemática del robot esta descrito por (1).

Donde k 1 y k 2 son coeficientes atribuidos a las distancias de los elementos actuantes (motores) y el centro de gravedad (RG).
La posición del vehículo permite la ubicación dentro del cultivo, dato importante a la hora de hacer localización simultánea y mapeo - SLAM.

La ubicación del efector final se describe con respecto al centro de gravedad de la plataforma. De esta forma, queda totalmente parametrizado y conocida la posición de la herramienta encargada de hacer la remoción maleza. Cabe aclarar que el modelo cinemático planteado trabaja sobre el supuesto de tener controles de bajo nivel, dedicados a asegurar el control dinámico de la plataforma y en general su desplazamiento. Los tiempos de establecimiento de la dinámica son mucho más rápidos, comparados con los del proceso de remoción. Igual, dentro de la estrategia de operación de toda la plataforma se cuenta con tener el robot estático al momento de realizar la remoción.
C. Sistema de visión artificial
Con las cámaras embarcadas y un sistema de procesamiento de imagen con la Nvidia-Jetson, se realiza la captura de imagen, el procesado de ella y la posterior identificación de coordenadas de la maleza. La Fig. 7 ilustra el sistema de captura de imagen.
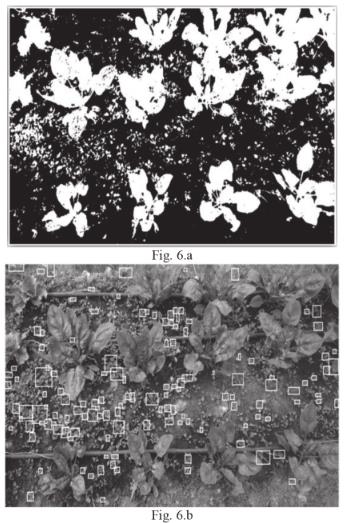
El sistema de visión artificial se centra en la extracción de características de bajo nivel como son color y tamaño de los elementos de la imagen, permitiendo separar lo que es maleza y plantas de interés, con costo computacional bajo. En un alto nivel de procesado, se analiza la textura de los agentes de la imagen. Sobre este principio, la plataforma se desplaza sobre el cultivo y ejecuta la labor de remoción deteniéndola sobre la escena. La Fig. 5 resume los pasos seguidos para la determinación de la ubicación de la maleza.

Fig. 5 Procedimiento seguido en el procesamiento de la imagen para la determinación de la posición de la maleza.
La Fig. 6.a muestra el resultado de la binarización de la imagen. La Fig. 6.bpresenta la salida del algoritmo de visión artificial, luego de realizar los pasos resumidos en el esquema de la Fig. 5La explicación del sistema de visión artificial y los detalles de estos resultados pueden ser consultados en [15].
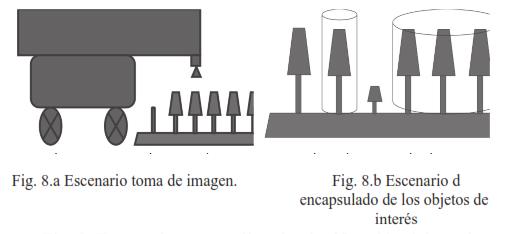
En este trabajo no se detalla el proceso de creación del entorno 3D digital, pero se describe globalmente lo que se realiza. Una vez identificada la maleza, con la cámara ZED, se procede a elaborar el mapa de profundidad, nube de puntos, los cuales se etiquetan y determinan que es el punto a proteger (planta de interés), el espacio libre, el punto de inicio (home o punto de arrancada del efector) y el punto final (ubicación de la maleza). Cabe resaltar que el espacio es discretizado proporcionalmente al tamaño del efector final. La Fig. 7 presenta el escenario donde se identifican los elementos del espacio de trabajo y la trayectoria a realizar.

D. Estrategia para la remoción de la maleza en función de la plataforma Ceres-AgroBot
Basado en los sistemas embarcados en la plataforma, se planifica la trayectoria que debe seguir el efector final hasta alcanzar la maleza. Partiendo de tener un mapa de profundidad, más la ubicación de los objetos de la escena (plantas de interés, espacio libre y maleza), se encapsulan los objetos de interés dando un margen de seguridad sujeto al tamaño de la herramienta. La Fig. 8.b ilustra el encapsulado, englobándolo en cubos que no pueden ser tocados durante la planificación A*. Desde la teoría de planificación de trayectorias, estos son considerados obstáculos en el espacio de configuración. Cabe resaltar que la idea de usar una herramienta tipo taladro se debe a que, dentro de los estudios para la conservación de la tierra, se busca no emplear químicos o elementos que dañen el suelo. Con este trabajo se plantea destruir la planta desde su tallo y raíz, de tal modo que la maleza destruida sirva de abono a la tierra.
III. CONTEXTUALIZACIÓN ALGORITMO A* Y CURVAS DE BÉZIER
La técnica de A estrella, A*, es considerada como un método completo usado en la solución de problemas de planificación en muchos trabajos referenciados. Cumple con ser un algoritmo relativamente sencillo de codificar, rápido de evaluar y orientado a dar soluciones globales.
El principio del algoritmo A* se centra en conocer la posición inicial del efector de remoción de maleza q start , la posición a la que debe ir la herramienta q target , y la información de la escena en cuanto a espacios libres y los ocupados por los obstáculos. Luego, se debe tener presente el costo de desplazarse al nodo siguiente y lo que falta por llegar al punto final, siendo la suma de estos, el costo real de avanzar. En forma matemática se puede representar por (2).

Donde n es el nodo a evaluar; 𝑔 es el costo acumulado para llegar a ese nodo, desde el nodo de partida; ℎ es un valor heurístico asociado por desplazarse del nodo a evaluar, hasta el nodo destino. A* es un algoritmo completo, esto es, que encuentra solución desde que la haya [24] y [25]. A nivel de costo computacional, se tiene que es proporcional a la discretización que se tenga del espacio de trabajo y a la calidad de la heurística asociada al problema.
A. Teoría de Bézier
Esta teoría se basa en las parametrizaciones polinómicas y ha sido tratada en la literatura [26] y [27]. El principio es simple: si se desea unir dos puntos, puede hacerse con líneas rectas. Si ahora se desea unir por medio de una curva, se ponen puntos de anclaje que tiran hacia esos puntos la línea que une los dos puntos iniciales, deformando la línea inicial. La extrapolación de estos puntos da polinomios que se acercan a los puntos de anclaje, dejando la trayectoria continua.
IV. RESULTADOS EN SIMULACIÓN
Planteado el procedimiento y la manera de solucionar el problema de encontrar la trayectoria para ir del punto inicial (start point - q start ) al punto final (target point - q target ), curva que debe ejecutar el efector final encargado de remover la maleza, se plantean dos escenarios para mostrar la efectividad de la solución planteada en este artículo y que se ajusta al robot Ceres-AgroBot.
Asumiendo que el sistema de visión artificial entrega un espacio de trabajo discretizado en una nube de puntos donde, posterior a un proceso que deja marcados los elementos que deben ser protegidos-destacados-apreciados en la simulación por los círculos color rojo y el punto donde está la maleza, que se resalta con un asterisco de color verde (ver Fig. 8), se procede a aplicar el algoritmo A* y el alisamiento por los algoritmos de Bézier.
A. Escenario uno
Debido a las longitudes de los actuadores y el tamaño de la herramienta de remoción de maleza, se tiene un espacio de trabajo discretizado por 5𝑐𝑚. Lo anterior deja 24 𝑝𝑢𝑛𝑡𝑜𝑠 en el eje 𝑥, 18 𝑝𝑢𝑛𝑡𝑜𝑠 en el eje 𝑦, y 12 𝑝𝑢𝑛𝑡𝑜𝑠 en el eje 𝑧. El espacio de trabajo cuenta con 4 obstáculos. La Tabla I, presenta los intervalos en cada eje, dentro de los cuales están encapsulados los elementos a cuidar.
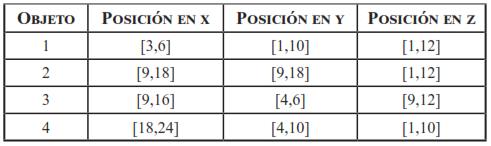
Teniendo la posición inicial 𝑃 𝑠𝑡𝑎𝑟𝑡 =(1,1,1) y la posición final 𝑃 𝑡𝑎𝑟𝑔𝑒𝑡 =(23,17,1), el resultado de aplicar el algoritmo A* se presenta en la Fig.8.

Fig. 8. Espacio de trabajo: elementos protegidos, punto de inicio y punto de llegada, ruta entregada por el algoritmo A*- escenario 1.
Con el resultado de la trayectoria encontrada por A*, se pasa por el algoritmo de Bézier, que, a su vez, cumple un papel implícito al alisado de la curva, el de discretizarla. Así se encuentra la trayectoria en un espacio de tiempo de 10 segundos, dentro del cual los actuadores deben llevar la herramienta de remoción de maleza. Este tiempo se calcula de la caracterización de los actuadores lineales cuando hacen su recorrido. La Fig. 9 presenta las curvas resultado. Se encuentra que las curvas arrojadas por A* presentan cambios fuertes sobre los 2 a 4 segundos y desde los 7 a 8 segundos, situación que se mejora por la continuidad que logran las curvas de Bézier, permitiendo un desplazamiento más continuo por parte de los actuadores.
Los anteriores resultados y los puntos de control para la determinación de la curva de Bezier se presentan en la Fig. 10 Cabe resaltar que se observa superposición de la herramienta sobre los objetos cuando lo hace con el resultado alisado, sin embargo, está cubierto por la zona de tolerancia que se deja cuando se realiza el cerramiento de los objetos de interés (banda de guarda).

Fig. 9 Desplazamientos del efector: Puntos en asterisco los encontrados por A*, y en línea continua los encontrados por Bézier- escenario 1.

Un análisis de tiempos muestra que son algoritmos muy rápidos en su ejecución, no superando los 3.1 segundos de máquina en un sistema de procesador i7 de 2.5GHz. Estos algoritmos se ejecutan aún más rápido en el sistema embarcado, pues están codificados en C y bajo Linux-ROS.
B. Escenario dos
Este escenario cuenta con 4 obstáculos. La Tabla II muestra los intervalos en cada eje, dentro de los cuales están encapsulados los elementos a cuidar, más la banda de seguridad.

Con la posición inicial 𝑃 𝑠𝑡𝑎𝑟𝑡 =(1,1,1) y la posición final 𝑃 𝑡𝑎𝑟𝑔𝑒𝑡 =(24,1,1), el resultado de aplicar el algoritmo A* se puede apreciar en la Fig. 11.
Fig. 11 Espacio de trabajo: elementos protegidos, punto de inicio y punto de llegada, ruta entregada por el algoritmo A*- escenario 2
La Fig. 12 muestra las curvas resultado después de alisar. Las curvas arrojadas por A* presentan cambios fuertes sobre los 2 a 4 segundos y desde los 6 a 9 segundos, situación mejorada por las curvas de Bézier. El tiempo de ejecución de los algoritmos es de 2,18 segundos.

Fig. 12 Desplazamientos del efector: Puntos en asterisco los encontrados por A*, y en línea continua los encontrados por Bézier, escenario 2.
La Fig. 13 presenta superpuestos los resultados de la planificación y el alisamiento de esta curva.

V. CONCLUSIONES Y PERSPECTIVAS
Dentro de los trabajos registrados para la realización de labores en el agro por parte de robots, no se cuenta con mucha documentación en un contexto de desarrollos en Colombia, pero sí existen numerosos trabajos en el entorno internacional. Por esta razón, son importantes los esfuerzos que se lleven a cabo en la dirección de dominar y proponer soluciones que faciliten y hagan más eficientes las labores en el agro en el contexto nacional.
Dentro de la teoría de modelado de sistemas robóticos, se encuentran diferentes configuraciones, siendo la del robot Ceres-AgroBot, la determinada como locomoción diferencial. Sin embargo, el trabajo de modelar y controlar el desplazamiento del sistema para lograr un desplazamiento sin colisión está abierto desde la teoría de SLAM.
Con el proceso de identificación de la maleza por técnicas de visión artificial, según el desarrollo presentado arriba, se define la labor de caracterizar una curva que pueda seguir el sistema de remoción de maleza integrado a la plataforma Ceres-Agrobot. Así, el posicionamiento de la herramienta de remoción se asegura con la trayectoria que se determina por el algoritmo A*. Es de notar que para que el movimiento sea suave y se ajuste a una curva sin discontinuidades (apropiada para los elementos actuadores), las curvas de Bezier se convierten en una buena opción. Aun cuando se observa que sobrepasa las esquinas de los obstáculos, estos están dentro de la zona de tolerancia, que se hace como banda de guarda sobre cada objeto a proteger, o sea, las plantas de interés.
El aporte de este trabajo consiste en brindar una solución para crear plataformas robóticas en el agro colombiano, autónomas y dedicadas a ayudar en las diversas tareas de la industria agrícola, específicamente, en la labor de vigilancia y remoción/destrucción de plantas no deseadas que afectan los cultivos.
La continuación de este trabajo contempla la posibilidad de integrar totalmente la plataforma en labores de navegación autónoma en un entorno de cultivos, donde se asigne a la plataforma Ceres-AgroBot, la función de supervisar un cultivo y tomar decisiones a la hora de dosificar nutrientes si faltan, remover maleza donde sea preciso, o aplicar insecticidas si existen plagas, todo dentro de un marco conservativo y amigable con el medio ambiente.

