











 Espanhol (pdf)
Espanhol (pdf)
 Artigo em XML
Artigo em XML Referências do artigo
Referências do artigo
 Enviar este artigo por email
Enviar este artigo por email Citado por SciELO
Citado por SciELO  Citado por Google
Citado por Google  Similares em
SciELO
Similares em
SciELO  Similares em Google
Similares em Google 
 Permalink
Permalink1. INTRODUCCIÓN
Actualmente la educación en Colombia se encuentra vinculada al desarrollo tecnológico. La actual proliferación de dispositivos tecnológicos ha facilitado la interacción de la educación con el internet y las Tecnologías de la Información y la Comunicación (TICs)1. Los laboratorios constituyen uno de los pilares fundamentales para la enseñanza de las ciencias básicas2. Entre los tipos más comunes de laboratorios, se encuentran de enfoque remoto, que son herramientas tecnológicas compuestas por software y hardware que les permite a los estudiantes realizar prácticas a distancia, ejecutando sus prácticas como si estuvieran en un laboratorio tradicional3. Generalmente el acceso se realiza a través de Internet o mediante una red académica de alta velocidad como RUTA CARIBE-RENATA para el caso de Colombia. La situación actual de la calidad educativa en Colombia es preocupante. De los 65 países que participaron en esos exámenes PISA, Colombia quedó en el puesto 61, superando apenas a Perú e Indonesia4),(5),(6. La educación media en Colombia se concentra en gran parte, en instituciones de educación pública, sim embargo solo el 1% de los colegios públicos en Colombia es considerado de nivel superior. Según el Banco Interamericano de Desarrollo (BID), la calidad de la infraestructura escolar podría influir de manera significativa en el aprendizaje de los estudiantes7. Entonces el aumento de estudiantes, la crisis económica actual, la deficiente infraestructura de los planteles educativos, los altos costos de los equipos de laboratorio y la necesidad de complementar el conocimiento teórico de algunas asignaturas con conocimiento práctico en la enseñanza media evidencian la necesidad de la implementación de diferentes laboratorios en áreas de las ciencias básicas2),(4),(5. Además de esta problemática, el Plan Nacional de Desarrollo en sus artículos 39, 46, 194 y 195, insta a intensificar el uso de la infraestructura ya existente, priorizando el desarrollo de contenidos y aplicaciones para cuatro áreas de manera prioritaria, destacando entre ellas, la educación; para hacer uso de las TICs como herramientas necesarias en desarrollo de las competencias establecidas en el Plan de Educación Nacional8.
Entonces, dadas las necesidades nombradas anteriormente, un laboratorio remoto constituye una solución sólida a la situación actual de los planteles educativos4),(5),(6, debido a las ventajas en optimización de espacio, recursos económicos y uso adecuado de los mismos. Actualmente en el país no existe ni una metodología o infraestructura sólida que permita el desarrollo de prácticas remotas; hasta el momento los mayores acercamientos que se tienen son el uso de laboratorios virtuales basados en simulaciones de fenómenos físicos, los cuales aunque permiten un acercamiento del estudiante al concepto, no generan un ambiente de realismo9.
En el presente documento se propone el desarrollo de un módulo experimental de difracción de la luz para un laboratorio de física de acceso remoto, con el fin de estudiar el fenómeno de difracción de la luz, dando la posibilidad de aprender más sobre el tema, utilizando herramientas de software como LabVIEWTM y HTML, para el acceso, control y visualización del experimento y técnicas de procesamiento digital de imágenes para la interpretación de los resultados obtenidos del fenómeno. La sección 2 explica la diferencia e importancia de los laboratorios virtuales y remotos, el estado del arte de algunos de los laboratorios de física controlados de forma remota, además los conceptos fundamentales del fenómeno de difracción de la luz para rendijas rectangulares y circulares. En la sección 3 se describe la metodología utilizada para la implementación del módulo experimental de difracción de la luz controlado de forma remota, especificando las técnicas de procesamiento digital de imágenes y calibración de cámara utilizados para el análisis del fenómeno, como el sistema cliente-servidor para realizar la comunicación remota. La sección 4 muestra los resultados experimentales obtenidos.
2. TEORÍA
A continuación se define qué es un laboratorio virtual y remoto, cómo se utiliza cada uno y su utilización en el desarrollo de prácticas experimentales, además el estado del arte de algunos de los laboratorios de fisca controlados remotamente.
2.1 Laboratorios Virtuales y Remotos
Las prácticas en los laboratorios se pueden realizar de tres formas: presencial, virtual y remota. Siendo la primera la más común en las instituciones educativas que cuentan con los espacios físicos y recursos para tener un laboratorio10. Los laboratorios virtuales son simulaciones en las que se utilizan elementos virtuales. Su uso posibilita que los estudiantes indaguen, modifiquen los valores de las variables del modelo experimental y realizar varias veces el experimento, por lo tanto, la intervención del docente debe ser planificada para promover el aprendizaje por descubrimiento y no por ensayo-error10. Por otro lado, con los laboratorios remotos el estudiante puede interactuar y experimentar de forma directa con el equipo11. Entonces un laboratorio remoto se define como "una aplicación basada en un entorno cliente - servidor, donde los clientes (estudiantes o investigadores desde un sitio remoto), solicitan servicios o contactan a un servidor (equipo de cómputo, software de acceso, dispositivos a manipular), a través de distintos medios de interconexión (Intranet, Internet)"12.
Este tipo de enfoque remoto, facilita la optimización del uso de la infraestructura debido a que puede ser utilizando por diferentes instituciones y solo requiere la implementación de un sólo laboratorio.
A continuación se mencionan algunos de los laboratorios de física controlados de forma remota que han sido desarrollado por diferentes instituciones educativas y grupos de investigación, además la metodología empleada en el procesamiento digital de las imágenes de difracción de la luz.
La Universidad Nacional de Colombia sede Manizales junto con el Laboratorio de Física del Plasma, cuentan con varias prácticas de laboratorio de Física Básica de forma remota a través de internet. El sistema utilizado es un kit de implementos desarrollados por PASCO; El desarrollo de la página web, el control y respuesta del sistema se hicieron utilizando Apache, MySQL, PHP, LabVIEWTM y Java13. El Grupo de Investigación GEMA de la Universidad Católica de Pereira junto con la Universidad Católica de Manizales y la Universidad de Medellín cuenta con 4 prácticas que se pueden realizar de forma remota para la enseñanza de la física. Las herramientas webs y software que se utilizaron fueron Wordpress, PHP, MySQL, HTML, Apache, CSS
y Javascript14. El grupo de investigación Grupo Galileo de la Universidad Nacional del Litoral cuenta con 3 prácticas de laboratorio de física que se controlan de forma remota. El software utilizado para acceder y controlar los diferentes dispositivos fue Delphi 6, Java y Visual Basic.NET15. En16 se desarrolló un laboratorio de circuitos eléctricos que es capaz de formar diferentes topologías, energizarlas y tomar mediciones desde internet. El software que se utilizó para el desarrollo del laboratorio fue LabVIEWTM, AppletVIEW y FileMaker Pro. La Universidad Carolina de Praga, junto con la Universidad Tamas Bata en Zlin y la Universidad de Trnava cuentan con 10 prácticas de laboratorio de física controladas de forma remota. Para el laboratorio remoto se utilizó el kit iSES (internet School Experimental System) como hardware y software que contiene el ISES hardware, el software controlador ISESWIN y el software ISES WEB Control, donde se utilizan herramientas como applets de Java, WEBserver, HTML, ImageServer y MeasureServer para el acceso, el control remoto y recepción de los datos experimentales del laboratorio a realizar17.
Existen diferentes enfoques para el estudio de la difracción de la luz, en18 proponen una metodología para el análisis de difracción utilizando la transformada de Fourier a una imagen digital del resultado de la captura de un láser de luz roja con longitud de onda A=650nm a un metro de una ranura simple con abertura de 0.08mm. Aunque esta técnica propone un método novedoso para el análisis de la difracción, carece de un procesamiento de señal que permita una mejora en la imagen, además que sus medidas no presentan un debido método de calibración, lo que hace que sus resultado sean poco confiables. En19 proponen un método utilizando Súper Resolución de Imágenes para la extrapolación de frecuencia característica y eliminación del aliasing con el fin de visualizar los puntos de intensidad de la rendija simple utilizada y determinar la abertura de esta. Aunque este método presenta resultados interesantes, su enfoque tiene como objetivo el diseño de un sistema CCD para la medida de difracción, lo que implica la construcción del sistema haciéndolo poco viable para la implementación del proyecto. En20 presentan un método para la simulación de la propagación de campo basado en el espectro angular de ondas planas utilizando el dominio de Fourier. Este método elimina las limitaciones geométricas que plantea el cálculo de propagación convencional y permite calcular amplitudes complejas de ondas difractadas en un plano no paralelo a la abertura. Aunque el método permite el análisis de difracción de ondas de luz, este método se plantea solo para simulaciones y no se hace un análisis de la influencia del ruido en el método. En21 se propone un trabajo para el análisis del espectro de difracción de la luz en una doble rendija con el software PixelProfile, el procesamiento digital de las imágenes capturadas es realizado con un grupo de estudiantes. Aunque se logran resultados interesante para el estudio del fenómeno, este es un procedimiento manual que requiere intervención humana y no puede ser acoplado en el proyecto.
2.2 Difracción de la luz
En la difracción, dependiendo como inciden las ondas al objeto y la distancia entre el objeto y la pantalla sobre la cual se observa el patrón, se puede hablar de difracción de Fraunhofer o de Fresnel. En el primero las ondas que inciden y emergen sobre el objeto son planas y la distancia debe ser grande comparada con las dimensiones del objeto, mientras que en el segundo la fuente puntual de las ondas incidentes, o el punto donde se observa el patrón de difracción, o ambos, están a una distancia finita del objeto22. Dependiendo de la abertura del objeto se puede observar un patrón diferente del fenómeno de difracción. En el caso de la difracción de Fraunhofer por una rendija rectangular el objeto es una rendija rectangular muy angosta (comparables con λ) y larga, donde se observa un máximo de intensidad que es una onda esférica en el origen y pequeñas ondas esféricas secundarias (mínimos secundarios); llamadas ondas difractadas, que se combinan constructiva o destructivamente en una pantalla sobre la cual es posible observar un patrón de difracción, en la figura 1 se observa la distribución de intensidad luminosa a lo largo de esta22.

La posición de las franjas oscuras se obtiene con la ecuación (1):

Donde b corresponde al ancho de la rendija, m es el orden del patrón de difracción para mínimos de intensidad, λ es la longitud de onda de la luz incidente y L es la distancia de la rendija a la pantalla.
La difracción de Fraunhofer por una abertura circular presenta muchas características similares a la difracción de Fraunhofer por una rendija rectangular, sólo que en este caso el objeto es una rendija de abertura circular lo suficientemente pequeña y el patrón de difracción consiste en una serie de círculos similares de intensidad decreciente. Lo suficientemente nítidos para poder realizar las mediciones de longitud como se muestra en la figura 2.

El radio del disco de Airy está dado por la ecuación

Donde R viene determinado por la ecuación

Siendo a el radio de la abertura circular, λ la longitud de onda de la luz utilizada para obtener el patrón de difracción, q es el radio del primer disco oscuro (disco de Airy), R la distancia entre el centro de la abertura circular y el primer disco oscuro y L la distancia de la abertura circular a la pantalla22.
3. METODOLOGÍA
La metodología implementada para el desarrollo de la herramienta propuesta puede describirse a partir del diagrama mostrado en la figura 3, donde se divide en tres etapas que consisten en la construcción y control del módulo experimental de difracción de la luz, procesamiento y análisis del patrón de difracción y el sistema cliente servidor. En esta sección se propone utilizar como elemento sensor para analizar el patrón de difracción de cada rendija, una cámara web Microsoft LifeCam Studio para la adquisición y procesamiento digital de las imágenes de difracción, en algunos trabajos utilizan como elemento sensor una fotorresistencia LDR la cual debe estar calibrada, las medidas de intensidad luminosa se toman moviendo la fotorresistencia donde incide la luz del láser difractada por la rendija23.

Figura 3 Esquema general del módulo experimental de difracción de la luz controlado de forma remota.
3.1. Construcción y control del módulo experimental de difracción de la luz
Para la construcción de este módulo experimental se utilizó un diodo láser de color rojo de una longitud de onda de 650nm en forma de punto que incide sobre la rendija, además se seleccionaron 3 rendijas simples (rectangulares) con aberturas diferentes y una rendija circular cuyas mediciones se especifican en la tabla 1.
Tabla 1 Medidas de las rendijas.
| Rendijas | Medidas | |
| Rendija Simple 1 (RS1) | Ancho: 0.3mm | Largo: 2cm |
| Rendija Simple 2 (RS2) | Ancho: 0.35mm | Largo: 2cm |
| Rendija Simple 3 (RS3) | Ancho: 0.50mm | Largo: 2cm |
| Rendija Circular (RC) | Diámetro: 0.48mm | |
El módulo es controlado por medio de un microcontrolador PIC 18F2550, el cual se encarga de controlar los movimientos de desplazamiento y giro del sistema de rendijas, que se realiza a partir de un motor DC y un motor paso a paso AC respectivamente. El programa implementado para el PIC realiza las tareas especificadas en la figura 4, que básicamente consisten en:

1) Desplazar horizontalmente el sistema de rendijas a la distancia que le corresponde a cada una de éstas, con el fin de poder visualizar el fenómeno. 2) Controlar el sensor inductivo para que detenga el motor cada noventa grados (90°) en el disco del sistema de rendijas. 3) Comunicar el sistema y la interfaz por el puerto USB. Se escogió esta comunicación ya que la mayoría de computadores cuentan con un puerto USB, lo que hace que el módulo sea más versátil.
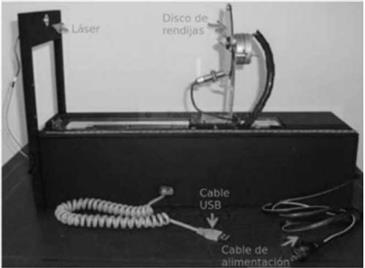
La figura 5 muestra el módulo de difracción de la luz que se construyó con la tarjeta control implementada para su comunicación con el computador.
3.2. Procesamiento y análisis del patrón de difracción
Esta etapa consiste básicamente en dos tareas: 1) calibración de la cámara y 2) procesamiento digital de las imágenes de difracción utilizando una cámara web Microsoft LifeCam Studio y el toolbox de NI Vision Development de LabVIEWTM.
3.2.1 Calibración de la cámara
Para la obtención de los parámetros intrínsecos de la cámara se utilizó el método de Zhang, este método de calibración se basa en el cálculo de una transformación por medio de un patrón planar donde la transformación de P3 a P2 está dado por:

Donde  son las coordenadas en 2D y son las coordenadas en 3D. Por lo tanto para calibrar la cámara por el método de Zhang se siguieron los siguientes pasos:
son las coordenadas en 2D y son las coordenadas en 3D. Por lo tanto para calibrar la cámara por el método de Zhang se siguieron los siguientes pasos:
1) Capturar N imágenes del patrón diseñado: se capturó un conjunto de fotos del patrón de calibración simétrico con cuadros de 30x30mm como se puede observar en la figura 6. 2) Calcular las correspondencias entre los puntos del patrón y los puntos hallados en cada imagen. 3) Calcular los parámetros intrínsecos y extrínsecos de la cámara utilizando el algoritmo de Zhang desarrollado en24.

Una vez conocidos los parámetros intrínsecos y extrínsecos de la cámara se puede utilizar la ecuación (5) y para la proyección de los puntos ideales del patrón en la imagen capturada.


Donde [x,y] son las coordenadas en píxeles de imagen y [X,Y,Z] los puntos ideales25.
2. Procesamiento digital de las imágenes de difracción
Con el objetivo de mejorar la calidad de las imágenes adquiridas, se utilizó el procesamiento digital de imágenes para eliminar las regiones que no son de interés, realzar las zonas importantes, limpiar y extraer información del patrón de difracción para determinar la abertura de cada rendija. La figura 7 muestra el diagrama esquemático del algoritmo implementado para cada una de las imágenes adquiridas.

a) Espacio de color HSI: Este espacio de color se compone de tres canales, Tono (H), Intensidad (I), y Saturación (S). Para este caso, se trabajó específicamente con la matriz de intensidad, ya que representa la iluminación que se percibe de la imagen y las imágenes de difracción poseen un alto contenido de iluminación. En26 se muestra el procedimiento para realizar la conversión del espacio de color RGB a HSI.
b) Filtro pasa bajo: Para mejorar los bordes y reducir el ruido del máximo central y de los mínimos secundarios, se aplicó un filtro pasa bajo que consiste en trasladar una matriz rectangular de mxn por cada píxel de la imagen, esta matriz se conoce máscara o kernel. Este filtro calcula un nuevo valor para cada píxel evaluando la suma de los productos obtenidos al multiplicar uno a uno los términos de la ventana con cada píxel. Entonces para evaluar la vecindad se realiza el procedimiento de convolución, la convolución de una imagen de MxN con un kernel de mxn (h) viene dado por la ecuación ecuación (7) 26.

c) Umbralización local adaptativa utilizando algoritmo Niblack: Debido a que las imágenes en escala de gris del patrón de difracción no poseen un fondo definido es necesario encontrar un umbral T(x,y) para cada píxel. En este caso se utilizó el algoritmo de Niblack, donde el umbral local T(x,y) en la posición (x,y) es calculado utilizando una ventana de wxw como es muestra en la ecuación (8).

Donde m(x,y) y δ(x,y) son la media y la desviación estándar local del píxel en el interior de la ventana local y k es un factor que puede ser de 0.2 para objetos brillantes y -0.2 para objetos opacos27.
d) Operaciones morfológicas y reconstrucción morfológica: Para reducir el ruido presente en las imágenes se utilizan distintas operaciones morfológicas y reconstrucción morfológica, que se mencionan a continuación:
• Remover los bordes de los objetos: consiste en la eliminación de los objetos que tocan el borde de la imagen seleccionando un marcador adecuado para lograr este efecto y especificando la conectividad. El marcador F se define de la siguiente manera:

Donde I es la imagen original que se utiliza como máscara de la imagen en la ecuación (9), y H es la reconstrucción que sólo contiene los objetos que tocan los bordes.

La diferencia 1-H, tendrá entonces sólo los objetos que no tocan los bordes26.
• Remover objetos pequeños: consiste en eliminar los objetos que sean más pequeños que el elemento estructurante al momento de erosionar. Esta reconstrucción viene dada por la ecuación (11).

Donde f corresponde a la imagen, λa al tamaño de la imagen,  es la reconstrucción de la imagen erosionada, A(X) es el área de X28.
es la reconstrucción de la imagen erosionada, A(X) es el área de X28.
• pertura: Esta operación morfológica realiza una suavizado de los contornos de la imagen (A), elimina las regiones sobresalientes que no están contenidas dentro del elemento estructurante (B) y elimina las zonas que son más delgadas que (B). Este proceso consiste en erosionar A con B para luego realizar la dilatación del resultado anterior con B como se describe en la ecuación (12),26.

• Separar objetos y envolvente convexa: la función separar objetos se encarga de romper las zonas que son estrechas y alargadas y de separar los objetos que se tocan con respecto al tamaño de un filtro. Esta operación realiza un número determinado de erosiones pero conservando el mismo tamaño de los objetos pero ya separados29. La función envolvente convexa (Convex Hull) es útil para el cierre de los objetos a pesar de que el contorno sea discontinuo. La función convex calcula una envolvente convex alrededor del perímetro de cada objeto, cerrando efectivamente el objeto29.
e) Análisis de partículas: una vez que se obtienen los objetos pertenecientes al patrón de difracción (máximo central y mínimos secundarios) y debidamente etiquetados, es necesario realizar algunas mediciones de la forma de los objetos de la imagen, en este caso del centro de masa y la ubicación de los objetos.
• Centro de masa: devuelve las coordenadas del centro de gravedad de un objeto, este centro de gravedad de un objeto se compone de N píxeles, Pi se define como el punto G tal que:

Siendo XG y YG la ubicación promedio de los puntos centrales de los segmentos horizontales y verticales del objeto, los cuales se define en las ecuaciones (14) y (15),29.


• Máximo Feret diámetro: es el segmento de línea que conecta los dos puntos del perímetro del objeto que son más alejados. En este caso se utilizó el Max Feret Diameter Start que son los dos puntos que definen el máximo Feret diámetro de la izquierda y el Max Feret Diameter End que son los dos puntos que definen el máximo Feret diámetro de la derecha29.
3.3 Sistema cliente servidor
Para el desarrollo de la práctica de difracción de la luz fue necesario construir una interfaz que permitiera una fácil interacción entre el cliente (estudiantes) y el servidor (módulo experimental). Para la construcción de la interfaz se utilizó el software de LabVIEW™, el cual se encarga de:
Establecer la comunicación USB entre el módulo y la interfaz que se desarrolló con el driver NI VISA. Configurar la cámara web Microsoft LifeCam Studio y capturar el fenómeno de difracción de la luz. Realizar el procesamiento digital de las imágenes adquiridas con el NI Vision Development. Acceder y controlar remotamente la interfaz con la herramienta Web Publishing Tool. Crear un documento de Excel con los resultados obtenidos del laboratorio. Enviar los resultados de la práctica utilizando el protocolo SMTP de LabVIEWTM.
La figura 8 muestra un esquema general de los procesos que se realizan en la interfaz.

Para acceder a la interfaz y desarrollar el laboratorio se elaboró una página WEB utilizando HTML y CSS donde se hay un registro de usuario, inicio de sesión y horario de reserva para realizar la práctica. La dirección de este sitio es: <http://www.difraccion.site40.net/>. Este sistema permite:
1) Establecer una conexión con el dispositivo. 2) Establecer una conexión a cualquier dirección IP que esté conectada en la misma red LAN del módulo (Intranet). 3) Enviar los datos de movimiento, relacionados con el posicionamiento de las rendijas. Interpretar y procesar la información adquirida por la cámara web.
4. RESULTADOS Y DISCUSIÓN
A continuación se muestra el resultado obtenido en cada una de las etapas del procesamiento aplicado a la imagen del patrón de difracción de la rendija simple 1, teniendo en cuenta la metodología desarrollada en el ítem anterior.
La figura 9 muestra el patrón de difracción obtenido de la rendija simple 1 en el espacio de color HSI tras aplicar un filtro pasa bajo con un kernel de 7x7 que se muestra en (16), donde se observa cómo se difuminan los bordes en cada uno de los óvalos del patrón de difracción.


La figura 10 muestra la umbralización adaptativa utilizando el algoritmo Niblack con una ventana de 58x44, un factor de desviación de 0.28 y k de 0.2. En la imagen se observa la presencia de partículas que no son de interés alrededor del patrón de difracción.

La siguiente figura muestra los resultados obtenidos tras aplicar las diferentes operaciones morfológicas y reconstrucción morfológica. En la figura 11a se removieron los bordes de los objetos utilizando un elemento estructurante cuadrado de dimensiones 3x3, conectividad 4, sin embargo se observa la presencia de partículas que no pertenecen al patrón de difracción por lo que se erosiona la imagen con 6 iteraciones, un elemento estructurante de 3x3, conectividad 4, en la figura 11b se visualiza el resultado obtenido; sin embargo todavía se tienen objetos que no son de interés, por lo que se aplicó la operación morfológica de apertura con un elemento estructurante hexagonal de dimensiones 11x11, luego se erosiono 5 veces con un elemento estructurante de dimensiones 3x3 para separar los objetos que se tocan como se muestra en la figura 11c. Debido a que todavía hay objetos que no pertenecen al patrón de difracción, es necesario remover los objetos pequeños (reconstrucción morfológica) con 6 iteraciones, conectividad 4 y tamaño del elemento estructurante de 3x3 y para mejorar el contorno de los bordes de los objetos se realizó un convex Hull, la figura 11d muestra el resultado obtenido después de realizar estos dos procesos.

Figura 11 Operaciones morfológicas y reconstrucción morfológica: a) remover los bordes de los objetos, b) apertura de área, c) remover los objetos pequeños y separar los que se tocan y d) remover los objetos pequeños y aplicar Convex Hull.
En la figura 12 se puede apreciar el patrón de difracción producido por cada una de las rendijas que se implementaron, donde se observa que en las rendijas simples(a, b y c) dependiendo del ancho de la ranura, el tamaño del máximo central cambia junto con la distancia que hay entre el máximo central y los mínimos secundarios. Cada una de las imágenes adquiridas pasó por una etapa de procesamiento, con el fin de mejorar la calidad de estas y a su vez de extraer la información necesaria para el desarrollo de la práctica.

Figura 12 Imágenes capturadas y procesadas del fenómeno de difracción de la luz producido por diferentes rendijas.
La figura 13 muestra el resultado obtenido después de realizar varias veces el experimento en la salida de la etapa de procesamiento, observando un comportamiento similar en cada una de las rendijas, se debe tener en cuenta que el procesamiento digital de imagen se realizó para tener una mejor observación del patrón de difracción.

Una vez que se logró remover el ruido presente en las imágenes de cada rendija, es necesario determinar las medidas de las características de cada uno de los objetos presentes en la imagen, para este caso fue necesario utilizar el centro de masa del máximo central de las rendijas simples y el centro de masa del disco de Airy de la rendija circular. Además, el Max Feret Diameter Start (1) y el Max Feret Diameter End (2) del máximo central, mínimos secundarios, y del primer disco oscuro de las rendijas simples y de la rendija circular como se observa en la figura 14.

Figura 14 Medidas tomadas de las rendijas. a) Rendija simple: máximo central, b) rendija circular: disco de Airy y primer disco oscuro.
Para encontrar la distancia L_1 (distancia del máximo central al primer mínimo secundario m_1=-1) de una rendija simple como se ilustra en la figura 15, y calcular la abertura de la rendija utilizando la ecuación (1), se realizó el siguiente procedimiento:

1) Calcular d1: utilizando el punto obtenido con el Max Feret Diameter End de m1 y el punto encontrado con el Max Feret Diameter Start del máximo central se calcula la distancia entre estos dos puntos. 2) Encontrar P1: se calcula el nuevo punto sumando el punto del Max Feret Diameter Start del máximo central con la distancia d12. 3) Calcular L1: es la distancia entre el centro de masa del máximo central y P1 Para ambos puntos se asume que el valor de la coordenada en y es igual en todos los casos. Este procedimiento se repite para los demás mínimos secundarios m=-2,-3,...,k. Para m=1,2,...,k, siendo k la cantidad de mínimos secundarios; lo único que cambia es d utilizando el punto del Max Feret Diameter
Start para m y el punto Max Feret Diameter End para el máximo central.
Para encontrar el radio q del primer disco oscuro de la rendija circular como se muestra en la figura 16 y calcular el radio de la rendija utilizando las ecuaciones (2) y (3), se realizó el siguiente procedimiento:

1) Calcular d: utilizando el punto obtenido con el Max Feret Diameter Start del primer disco oscuro y el punto encontrado con el Max Feret Diameter Start del disco de Airy se calcula la distancia entre estos dos puntos. 2) Encontrar P: se calcula el nuevo punto sumando el punto del Max Feret Diameter Start del disco de Airy con la distancia d /2. 3) Calcular q: es la distancia entre el centro de masa del disco de Airy y P.
En las rendijas simples se obtuvo la distancia que hay entre el centro del máximo central y cada uno de los primeros cuatro mínimos secundarios para encontrar el ancho de la rendija rectangular (b), mientras que en la rendija circular se midió la separación angular entre el centro del disco central y el centro del primer disco oscuro (q) y de esta forma determinó el diámetro de la rendija circular (D), como se observa en la figura 17.

Para determinar el valor experimental de cada una de las aberturas de las rendijas se utilizó la ecuación (1) para las rendijas simples, y las ecuaciones (2) y (3) para la rendija circular, considerando la longitud de onda de la luz incidente (λ) de 650nm la distancia de la rendija a la pantalla (L) de 1.54m.
La tabla 2 muestra las medidas reportadas para cada una de las rendijas con su respectiva incertidumbre y error de medición para un conjunto de 30 datos por cada rendija, donde el error de medición de la abertura de las rendijas está entre el 2.2% y 4.6%.
Tabla 2 Medidas reportadas de cada rendija.
| Rendija | Medida | Error |
| RS1 | 0.308 ± 0.009 | 2.7 |
| RS2 | 0.334 ± 0.006 | 4.6 |
| RS3 | 0.511 ± 0.013 | 2.2 |
| RC | 0.488 ± 0.012 | 2.4 |
Además se verificó su funcionamiento realizando varias pruebas en cada una de las etapas iniciando por el acceso al sitio web, registro e inicio de sesión de diferentes usuarios, acceso a la interfaz para el desarrollo de la práctica, selección de las rendijas, procesamiento y análisis de los resultados obtenidos. Para lo cual fue necesario desarrollar una guía de laboratorio que le permitiera al usuario comprender el procedimiento a desarrollar en la práctica para luego realizar un análisis de cada uno de los datos obtenidos de manera experimental, la guía se encuentra disponible en el siguiente link: <https://drive.google.com/ open?id=0B_3y2KiKO-VcYnJUa21IOWRwNlk>. En la figura 18 se visualiza parte de la interfaz desarrollada en LabVIEWTM utilizando la herramienta Web Publishing Tool para acceder al laboratorio y controlar remotamente el módulo, además se muestra un estudiante del colegio Matecaña de la ciudad de Pereira que participó de manera voluntaria en el desarrollo de la práctica.

5. CONCLUSIONES
En este trabajo se propone una solución de bajo costo para aliviar la actual problemática de infraestructura en las instituciones educativas utilizando herramientas con enfoque TICs. Esta solución genera aportes y nuevas estrategias pedagógicas en la enseñanza de la ciencia; permitiéndole tanto al docente como al estudiante aprovechar de manera más eficiente los recursos tecnológicos disponibles en las instituciones educativas. Esta solución amplía el acceso a la experimentación permitiendo al estudiante complementar sus conocimientos con el aporte que genera una sesión práctica. Además permite evidenciar y comprender el comportamiento de los fenómenos físicos estudiados por medio del análisis de los resultados experimentales y de los conceptos teóricos.
El software LabVIEWTM, se presenta como una alternativa viable para la implementación de un módulo experimental de acceso remoto, ya que garantiza las herramientas de comunicación, adquisición de datos, control de hardware, tratamiento de imágenes digitales y diseño de interfaces gráficas, necesarios en este tipo de proyectos.
El error de medición obtenido en el análisis de los resultados de cada rendija implementada fue menor al 5%, por lo que se puede considerar que el método propuesto es una opción viable para el análisis del fenómeno de difracción de la luz.
Se comprueba el funcionamiento de la metodología implementada para estimar el valor de las aberturas en cada una de las rendijas. En éste método se evidencia la importancia de eliminar las partículas que no pertenecen al patrón de difracción utilizando las diferentes operaciones morfológicas y reconstrucción morfológica como erosión, apertura, separación de objetos y envolvente convexa para calcular las distancias del máximo central a los mínimos secundarios de manera automática para cada una de las rendijas utilizando las característica de cada objeto como centro de masa y el máximo Feret diámetro.

