











 Spanish (pdf)
Spanish (pdf)
 Article in xml format
Article in xml format Article references
Article references
 Send this article by e-mail
Send this article by e-mail Cited by SciELO
Cited by SciELO  Cited by Google
Cited by Google  Similars in
SciELO
Similars in
SciELO  Similars in Google
Similars in Google 
 Permalink
Permalink
1. Introducción
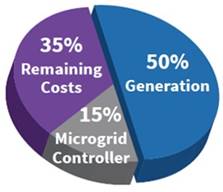
Los estándares IEEE Std 2030.7 e IEEE Std 2030.8, son de vital importancia con respecto a los requerimientos y pruebas de los MGCS, por tal motivo se pretende presentar de forma resumida los temas más relevantes mencionados en estos. El artículo How Microgrids Can Achieve Maximum Return on Investment (ROI) 1 muestra la importancia del MGCS, ya que, la arquitectura del sistema de control puede verse como el sistema nervioso de la MR. Las funciones inteligentes permiten toda su funcionalidad, desde el monitoreo y el envío económico de los recursos de energía distribuida (DER distributed energy resources), hasta la comunicación con las empresas de servicios públicos para conexión y desconexión 1. Este artículo también muestra el costo total del MGCS dentro de los costos totales del proyecto de la MR 1.
La Figura 1 muestra el costo del sistema de control, el cual puede representar entre un 10 % y un 15 % de los costos generales de desarrollo 1,2. Con lo anteriormente mencionado se puede observar que este artículo presentará una síntesis de los estándares ya citados.
2. Requerimientos del sistema de control establecidos por la IEEE Std 2030.7-2017
Una MR es un grupo de cargas interconectadas y DER con límites eléctricos claramente definidos que actúan como una entidad controlable única con respecto a la red, es decir, que tiene la autonomía para trabajar en modo isla o en modo conectada a la red 3.
El MGCS es aquel que incluye las funciones de control que definen a la MR como un sistema que puede administrarse a sí mismo, para funcionar en los dos estados (modos) anteriormente mencionados, y que para el estado conectado a la red puede participar en el intercambio de energía eléctrica, además que incluye las funciones del sistema de gestión de energía de la MR (MEMS Microgrid Energy Magement System) 3-5.
Las MRs se caracterizan por tener un MGCS, capaz de integrar y coordinar automáticamente la generación, el almacenamiento si se tiene, las cargas controlables y el equipo de interconexión de la red dentro de la MR, el cual se requiere para que pueda existir interoperabilidad entre estos dos sistemas 3,6,7.
El enfoque de implementación para la transición de modo conectada a la red a modo isla se deja al diseñador/operador de la MR 3.
2.1. Sistema de control de una microrred
El MGCS además de tener las características anteriormente mencionadas, también debe tener funciones de control de energía eléctrica y control en tiempo real que operen en las siguientes situaciones 3:
Operación en modo conectado a la red y en modo isla.
Transición automática del modo conectado a la red al modo isla para cargas de la MR, durante condiciones anormales del sistema de potencia e interrupciones planificadas de este.
Resincronización y reconexión del modo isla al modo conectado a la red.
Gestión de energía para optimizar la generación de potencia activa, reactiva y el consumo.
Prestación de servicios auxiliares, soporte a la red y participación en el mercado de energía y/o en la operación del sistema de servicios públicos, según corresponda.
Dado que existen muchas configuraciones posibles para las MRs dependiendo de la ubicación y el propósito, los requisitos y funciones de la MR y del MGCS serán diferentes. Por esta razón la IEEE 2030.7-2017 adoptará los requisitos y funciones aplicables a una amplia gama de MRs y MGCS, que son generales y comúnmente aplicables 3.
Un sistema de control es un software, hardware o una combinación de ambos y puede implementarse físicamente de varias formas, incluso centralizadas o distribuidas 2,3.
Dentro de las consideraciones generales y requerimientos, el operador de la red de distribución requiere unos requisitos que debe cumplir la MR que se interconecta. Estos incluyen requisitos técnicos como anti-isla, baja o alta tensión y/o frecuencia ride-through y calidad de energía, así como requisitos operativos con respecto a la importación y exportación de potencia activa y reactiva. La MR como entidad y el MGCS deben satisfacer estos requisitos que se mencionarán a continuación 3.
El sistema de control es el que logra satisfacer los requisitos de interconexión mediante el uso de funciones de nivel terciario, nivel secundario y nivel primario (3. La Figura 2 muestra la jerarquía del MGCS.
2.1.1. Nivel primario
Es el encargado de mantener estable la tensión y la frecuencia dentro de los límites establecido por el propietario u operador de la MR. Este nivel de control actúa en los controladores locales de las unidades de generación 8. Su respuesta es la más rápida, en comparación con el segundo y tercer nivel, está en el rango de milisegundos 9-11.
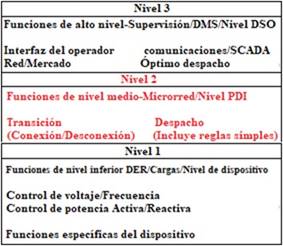
2.1.2. Nivel secundario
Dentro de este nivel se controla las desviaciones de tensión y frecuencia que se pueden llegar a dar en el nivel primario y también los cambios de estado de la MR, los cuales pueden ser, pasar de modo isla a modo conectado a la red o de modo conectado a la red a modo isla 3,12,13.
El control secundario es quien da el funcionamiento seguro y económico a la MR en cualquier estado donde esta se encuentre. Este nivel de control también se conoce como MEMS, y puede implementarse de manera central o distribuida. Para las desviaciones de tensión y frecuencia que se pueden dar en el primer nivel, este sistema permite que los controladores locales de los activos de la MR puedan tomar sus propias decisiones 3,12,13.
2.1.3. Nivel terciario
El control terciario es el nivel más alto del MGCS y dependiendo de los requisitos del sistema de alimentación establece puntos de ajuste a largo plazo y típicamente óptimos 14-16. También se encuentra relacionado con la optimización económica, es decir, basado en los precios de la energía y el mercado de la electricidad realiza el despacho óptimo 3,12,13.
2.2. Funciones centrales del Sistema de control de la microrred
El MGCS debe cumplir con los requisitos de las funciones básicas o centrales, las cuales se mencionaron anteriormente.
La función de despacho es la encargada de enviar información a todos los activos de la MR, para que el funcionamiento de ellos sea el adecuado, dependiendo del estado donde se encuentre la MR. Por ejemplo, si la MR cambia de modo conectado a la red a modo isla, entonces la función de despacho envía información a las protecciones para que cambien su configuración. Si es más factible consumir la energía de la generación distribuida, entonces enviará información a la MR para que se desconecte de la red de distribución 3,12,13.
La función de transición supervisa los cambios de estado de la MR, es decir, se encarga que este cambio se pueda dar de forma óptima. Esta informa a la función de despacho del cambio de estado de la MR, para que todos los activos reciban la información y puedan sincronizar su configuración con el cambio de la MR 3,12,13.
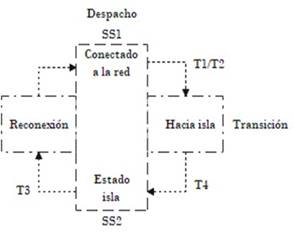
Con lo descrito de estas funciones centrales, se puede observar que tienen una relación y esto es lo que muestra la Figura 3.
2.2.1. Descripción general y características de la función de despacho
Esta función incluye el envío requerido para los dos estados básicos de la MR y para sus transiciones. Como se describirá más adelante, la función de despacho genera y ejecuta órdenes de despacho que son conjuntos de comandos para los activos de la MR apropiados de acuerdo con las reglas de despacho, que puede considerarse un conjunto de seis reglas, una para cada modo de despacho establecido por la función de transición (T1 a T4) y uno para cada modo de estado estable (State Stable SS1 y State Stable SS2) 3,12,13.
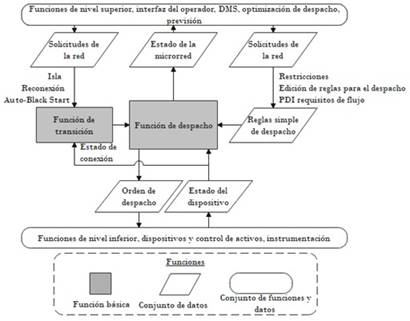
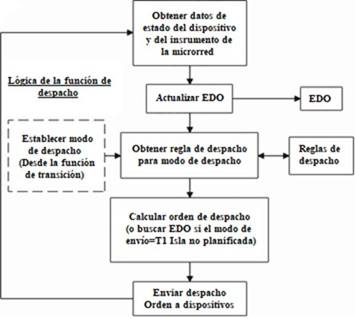
Debido al oficio de la función de despacho, esta se encuentra en los tres niveles de control, mientras que para una MR que permanece en forma aislada, no será necesaria la función de transición 3,12,13. La función de despacho que se muestra en la Figura 4, recibe como entradas el estado de la MR y sus componentes, el modo de despacho de la función de transición y un conjunto de reglas de despacho. Basándose en estas entradas, toma las debidas decisiones y lo envía a todos los activos de la MR con la frecuencia necesaria 3,12,13.
La excepción instantánea al proceso anterior se encuentra en la ejecución inmediata de una orden de despacho de emergencia (EDO emergency dispatch order) al ser configurada la función de despacho en modo isla no planificado por la función de transición 2. Esta orden de despacho puede incluir cambios en el despacho de generación y la desconexión de cargas según sea necesario, para que coincida la generación disponible con las cargas de emergencia. Esta orden se actualiza continuamente a medida que cambian las condiciones, y está disponible para su ejecución sin esperar a ser procesado 3,12,13.
Por ejemplo, a medida que el porcentaje de autogeneración cae por debajo de cierto nivel, el EDO puede actualizarse para desconectar inmediatamente una cierta carga de baja prioridad en un evento de isla no planificada. Dado que el EDO se calcula previamente y se actualiza continuamente, la función de despacho ejecuta el EDO inmediatamente después de cambiar al modo de despacho de isla no planificada. El EDO incluye acciones como desconexión de cargas de contingencia 3,12,13.
Las características de la función de despacho, incluidos los elementos y la caracterización de la función se dan en la Tabla 1, Tabla 2 y Tabla 3. En condiciones de estado estable, la función de despacho realizará las operaciones que se describen a continuación para los dos estados de la MR, conectado a la red (SS1) y en isla (SS2). Durante las transiciones recibirá información sobre la naturaleza de la transición a realizar y ejecuta las operaciones requeridas. Los modos incluyen isla no planificada (T1), isla planificada (T2), inicio en Black Start (T4) y reconexión (T3) 3,12,13.
La función de despacho para la operación conectada a la red debe incluir las siguientes características específicas 3:
Control/comando de activos DER, ya sea individualmente o de manera coordinada.
Gestión de cargas, cargas reducibles.
Control de despacho, ya sea en forma de una tabla de consulta o una función de optimización (si corresponde).
Operación de breaker, switches, otros dispositivos de conmutación y control, según corresponda.
Regulación de tensión usando métodos apropiados, incluyendo la conmutación de capacitores, cambiadores de TAPS, y la potencia reactiva (var) producida por las interfases en los inversores.
Implementación de niveles de intercambio de energía (P, Q) en el punto de interconexión (PDI).
La función de despacho para la operación en modo isla, debe incluir las siguientes características específicas 3,12,13:
Control/comando de activos DER, ya sea individualmente o de manera coordinada.
Gestión de cargas, cargas reducibles.
Control de despacho, ya sea en forma de una tabla de consulta o una función de optimización (si corresponde): Configuración de la red (P, Q) en el PDI a cero (0).
Operación de breaker, switches, otros dispositivos de conmutación y control, según corresponda
Tabla 1 Requisitos de la función de despacho, características y métricas.
| Elementos de la función | Caracterización de funciones | Parámetros y métricas | Enfoque de prueba |
|---|---|---|---|
| -Sistema de control de la microrred | Implementación de una tabla o algoritmo de despacho DER | Precisión de respuesta del sistema de control de la microrred, tiempo de estabilización | Medición del desempeño del sistema de control en el cumplimiento de objetivos |
| -Despacho DER (generación, almacenamiento) | |||
| Gestión de carga no crítica | Hacer cumplir con los puntos de ajuste | P, Q, V, f (según corresponda) en PDI, error de estado estacionario | Medición de P, Q, V, f (según corresponda) en PDI, valores de estado estacionario y error |
| Respuesta de la demanda | Hacer cumplir la priorización de carga y la reducción | P, Q, V, f (según corresponda) en PDI, respuesta dinámica (tiempo de subida, tiempo de estabilización, sobreimpulso) | Medición de P, Q, V, f (según corresponda) en PDI, respuesta dinámica (tiempo de subida, tiempo de estabilización, sobreimpulso) |
| Rendimiento del despacho del sistema de control de la microrred | Función de despacho, respuesta dinámica | Compilar respuestas, desviaciones en estado estacionario y transitorios. | Comparando métricas, cuantificando desviaciones/errores |
| Calidad de la energía eléctrica | Mantener niveles de calidad de energía por debajo de los umbrales establecidos | Distorsión armónica de tensión y corriente, armónicos individuales, caídas de tensión, subidas de tensión, cambios rápidos de tensión (RVC), parpadeo | Medición de distorsión armónica de tensión y corriente, armónicos individuales, hundimientos y subidas de tensión, cambios rápidos de tensión, parpadeo valor/error |
| Adquisición de datos | Respuesta del sensor | Señal disponibilidad/precisión | Medida de señal |
Fuente: adaptada de IEEE3
Tabla 2 Requisitos de la función de despacho, características y métricas, operación conectada a la red.
| Elementos de la función | Caracterización de funciones | Parámetros y métricas | Enfoque de prueba |
|---|---|---|---|
| Control/comando de activos DER | Despacho individual | Acuerdo de interconexión, P, Q en PDI | P, Q en PDI |
| Despacho coordinado | |||
| Gestión de la carga | Desconexión de carga, respuesta a la demanda | Satisfacer la demanda de carga | Satisfacer el control/regulación de la demanda de carga |
| Restauración de carga | |||
| Control de despacho | Tabla de búsqueda | Cumplir objetivos de despacho | Verificación/cuantificación de objetivos |
| Optimización (según corresponda) | |||
| Operación: Breakers, interruptores | Sistema de control de la microrred | Estado del dispositivo | Disponibilidad de la señal del estado |
| Regulación de voltaje | Conmutación de condensadores, cambio de TAPS del transformador | Regulación de voltaje | Precisión de regulación de voltaje, seguimiento de voltaje |
| Intercambio de potencia en el PDI | Sistema de control de la microrred | Cumplimiento de los requisitos P, Q en PDI | P, Q en PDI |
Fuente: adaptada de IEEE3
Tabla 3 Requisitos de la función de despacho, características y métricas, operación en modo isla.
| Elementos de la función | Caracterización de funciones | Parámetros y métricas | Enfoque de prueba |
|---|---|---|---|
| control/comando de activos DER | Despacho individual | V, f dentro del rango: carga no servida | V, f dentro del rango en PDI (abierto), P, Q que fluye dentro de la MR |
| Despacho coordinado | |||
| Gestión de la carga | Desconexión de carga, respuesta a la demanda | Satisfacer la demanda de carga | Deslastre de carga de emergencia, cantidad |
| Control de despacho | Tabla de búsqueda | Cumplir objetivos de despacho | Verificación/cuantificación de objetivos |
| Optimización (según corresponda) | |||
| Operación de breaker y switches | Comandos del sistema de control de la microrred | Estado del dispositivo | Disponibilidad de la señal de estado |
| Regulación de voltaje | Conmutación de condensadores, cambiador de TAPS del transformador | Regulación de voltaje y desviaciones | Regulación de voltaje, seguimiento de voltaje y calidad |
Fuente: adaptada de IEEE3.
Regulación de voltaje usando métodos apropiados, incluyendo la conmutación de capacitores, cambiadores de TAPS, y la potencia reactiva (var) producida por las interfases en los inversores.
Control de frecuencia mediante un generador de la MR de referencia o recurso de almacenamiento.
Mantener los niveles de calidad de energía, garantizar el monitoreo continuo de los niveles de calidad de energía eléctrica y tomar las medidas correctivas adecuadas.
Modos de transición: La función de despacho responde a eventos externos reenviando recursos, tales eventos incluyen transiciones, como se observa en la Figura 5. Estos modos de operación están asociados con las transiciones descritas que se harán más adelante, las cuales son: Isla planificada, isla no planificada, reconexión y Black Start 3,12,13.
Las cantidades medibles a las que están asociadas las métricas para la función de despacho se mostraron en la Tabla 1, Tabla 2 y Tabla 3, las cuales son 2,3:
Cantidades derivadas: frecuencia, tensión rms, corriente rms, ángulo de fase, potencia activa (incluida la dirección del flujo de potencia), potencia reactiva (adelantada o atrasada), energía eléctrica intercambiada en el PDI, índices de calidad de potencia (distorsión armónica de tensión y corriente, armónicos individuales, caídas de tensión, aumento de tensión, cambios rápidos de tensión [RVC], parpadeo [flicker]), errores de seguimiento de referencia.
Los escenarios para probar la función de despacho se definen para cada uno de los siguientes modos de operación básicos de despacho estable, descritos en la Tabla 1, Tabla 2 y Tabla 3 3.
Operación conectada a la red: variación de carga y la generación dentro de la MR, impacto en la operación y los flujos (P, Q) dentro de la MR y en el PDI.
Operación en isla: variación de la carga y generación dentro de la MR, impacto en la operación y los flujos (P, Q) dentro de la MR y las fluctuaciones (V, f) en el PDI y dentro de la MR.
2.2.2. Función de transición
Como se indica en la Figura 5, las transiciones pueden iniciarse por las siguientes solicitudes 3.
Solicitud de isla planificada (modo T2)
Solicitud de reconexión (T3) según corresponda, como inicio en Black Start habilitado (T4) según corresponda.
Las transiciones también son iniciadas por una condición del sistema que resulta en una transición de isla no planificada 3.
En la Tabla 4, Tabla 5, Tabla 6 y Tabla 7, se describen las operaciones que debe realizar el MGCS. La lógica de función de la función de transición requerida para cambiar la función de despacho entre uno de los seis modos de despacho ilustrados en la Figura 6 3.
Planear isla, el proceso y los pasos incluyen: Recibir comando de isla; equilibrio entre carga y generación (ajuste P y Q para que ambos sean 0 en el PDI); Establecer los controladores locales y dispositivos de protección adecuadamente; crear isla; transición del modo de despacho a isla en estado estable.
Isla no planificada, el proceso y los pasos incluyen: Detectar condiciones de isla; crear isla; establecer los controladores locales y dispositivos de protección adecuadamente; ejecutar las acciones preplaneadas requeridas, como la eliminación de carga (y/o implementar un black start si es necesario); transición al modo isla en estado estable.
Reconexión a la red, el proceso y los pasos incluyen: vuelva a sincronizar, configure/haga coincidir la tensión, el ángulo de fase y la frecuencia dentro de los límites prescritos especificados por los códigos o requisitos de red aplicables; configurar los controladores locales y dispositivos de protección adecuadamente; reconectarse; transición al modo conectado a la red en estado estable y restauración de cargas no críticas según corresponda.
El Black Start se implementa si es necesario. Los pasos de este son únicos para cada MR y no se especificarán.
Las cantidades medibles y las métricas asociadas para la función de transición, presentadas en la Tabla 4, Tabla 5, Tabla 6, y Tabla 7 3:
Cantidades derivadas: frecuencia, tensión rms, corriente rms, ángulo de fase, potencia activa (incluida la dirección del flujo de potencia), potencia reactiva (adelantada o atrasada), energía intercambiada en el PDI (modo conectado a la red), índices de calidad de la potencia (distorsión armónica de tensión y corriente, armónicos individuales, caídas de tensión, aumentos de tensión, cambios rápidos de tensión [RVC], parpadeo [flicker]), errores de seguimiento de referencia.
Tabla 4 Función de transición, características y métricas.
| Elementos de la función | Caracterización de funciones | Parámetros y métricas | Enfoque de prueba |
|---|---|---|---|
| Inicio de transición | Planificada o no planificada | Precisión de respuesta del sistema de control de la microrred y tiempo de estabilización | Medición de la respuesta del sistema de control |
| Equilibrio de carga y generación, según sea necesario | Cambio en ordenes de despacho de DER/carga (según sea necesario) | P, Q, V, f (según corresponda) en PDI, error de estado estacionario | Medición de P, Q, V, f (según corresponda) en PDI, error de estado estacionario |
| Transición a nuevas condiciones de operación | Cambio de ordenes de despacho de DER/Carga (según sea necesario) | P, Q, V, f (según corresponda) en PDI, respuesta dinámica (tiempo de subida, tiempo de estabilización, sobreimpulso) | Medición de P, Q, V, f (según corresponda) en PDI, respuesta dinámica (tiempo de subida, tiempo de estabilización, sobreimpulso) |
| Adquisición de datos | Respuesta del sensor | Disponibilidad de parámetros | Precisión del parámetro |
Fuente: adaptada de IEEE3
Tabla 5 Función de transición, características y métricas, isla planificada.
| Elementos de la función | Caracterización de funciones | Parámetros y métricas | Enfoque de prueba |
|---|---|---|---|
| Paso 1: iniciación | Recibir comando de isla | Recepción de señal de control | Verifique la recepción del comando, el tiempo recibido, el tiempo de intervención |
| Paso 2: equilibrio interno | Equilibrio de carga y generación (ajuste P, Q para que sea 0 en PDI) | Balance de carga/generación (P, Q) en la microrred, tiempo de reacción | Verifique las señales según sea necesario |
| Paso 3: regresar | Configure los controladores locales y los dispositivos de protección adecuadamente | Señales enviadas, cambios implementados | Verifique las señales según sea necesario |
| Paso 4: pasar al modo isla | Creación del modo isla | Se abre la conexión de PDI | Verificación de apertura de PDI, tiempo de reacción |
| Paso 5: volver a la operación normal | Transición del modo de despacho a modo isla en estado estable | V, f dentro del rango; valores de calidad de energía por debajo de los umbrales: órdenes de despacho | Observe V, f, respuesta transitoria (tiempo de subida, tiempo de estabilización, sobreimpulso) y niveles de calidad de potencia |
Fuente: adaptada de IEEE3
Tabla 6 Función de transición, características y métricas, isla no planificada.
| Elementos de la función | Caracterización de funciones | Parámetros y métricas | Enfoque de prueba |
|---|---|---|---|
| Paso 1: iniciación | Detectar condiciones de isla | Recepción de la señal de control | Verifique la recepción del comando, el tiempo recibido, el tiempo de intervención |
| Paso 2: regresar | Configure los controladores locales y los dispositivos de protección adecuadamente | Señales enviadas, cambios implementados | Verifique las señales según sea necesario |
| Paso 3: pasar al modo isla | Ejecute acciones planificadas previamente, como la desconexión de carga (implemente un Black Start si es necesario) | Apertura de la conexión de PDI | Verificación de apertura de PDI, tiempo de reacción |
| Paso 4: volver a la operación normal | Transición del modo de despacho a modo isla en estado estable | V, f dentro del rango; valores de calidad de energía por debajo de los umbrales: órdenes de despacho | Observe V, f, respuesta transitoria (tiempo de subida, tiempo de estabilización, sobreimpulso) y niveles de calidad de potencia. |
Fuente: adaptada de IEEE3
Tabla 7 Función de transición, características y métricas, reconexión.
| Elementos de la función | Caracterización de funciones | Parámetros y métricas | Enfoque de prueba |
|---|---|---|---|
| Paso 1: iniciación | Vuelva a sincronizar, iguale el voltaje, el ángulo de fase y la frecuencia dentro de los límites prescritos | Diferencia (V, ángulo de fase), tasa de cambio de ángulo o diferencia de frecuencia, dentro de los límites | V, ángulo de fase, tasa de cambio del ángulo de fase o diferencia de frecuencia, tiempo de respuesta |
| Paso 2: regresar | Configure los controladores locales y los dispositivos de protección adecuadamente | Señales enviadas, cambios implementados | Verifique las señales según sea necesario |
| Paso 3: pasar al modo conectado a la red | Volver a conectar | Cierre de conexión de PDI | PDI cerrado, verificar flujo inicial P, Q, tiempo de reacción |
| Paso 4: pasar a la operación normal | Transición al modo de despacho conectado a la red en estado estable y restauración de cargas no críticas | V, f dentro del rango; valores de calidad de energía por debajo de los umbrales: órdenes de despacho para el modo conectado a la red | Verifique el flujo final de P, Q, tiempo de estabilización; observar los niveles de calidad de energía |
Fuente: adaptada de IEEE3
En los escenarios para probar la función de transición, se definirán para cada una de las siguientes transiciones básicas 3:
Isla planificada: Esta transición se inicia cuando se recibe una solicitud externa, normalmente enviada por el sistema de distribución o el operador de la MR.
Isla no planificada: Esta transición es el resultado de un evento en la red de distribución. Puede implicar un Black Start si el sistema de control está diseñado de esta manera.
Transición de isla a modo conectado a la red: esta transición implica la sincronización y la reconexión de la MR.
3. Pruebas del sistema de control establecidos por la IEEE Std 2030.8-2018
Esta norma proporciona los requisitos de prueba para los controladores de MR definiendo condiciones iniciales uniformes, eventos de inicio, criterios de medición y requisitos relevantes para el rendimiento y funcionamiento del controlador de MR y/o el sistema de MR que se controla en el punto de interconexión 17.
La intención de este estándar es definir las condiciones iniciales de la prueba, los eventos de iniciación y las pruebas necesarias para caracterizar y validar las operaciones y la funcionalidad del MGCS antes de que este pueda ser aceptado para la puesta en servicio 17.
Esta norma establece los criterios y requisitos para probar el MGCS en el PDI. No está diseñado como un conjunto detallado de requisitos paso a paso para probar controladores de MRs o MGCS 17.
Las dos funciones principales para probar son: función de transición y despacho, estas funciones se prueban para los estados básicos de la MR, que son conectado a la red y estado isla 3,17. Se prescribe un marco para la prueba del MGCS
El enfoque requiere que el usuario realice lo siguiente:
Definir una o varias MRs específicas para las que se probará el MGCS.
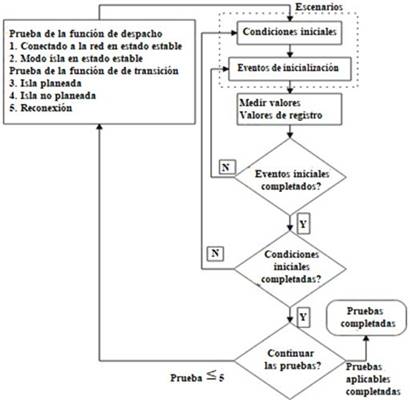
Definir las combinaciones de condiciones iniciales y eventos de inicio que se probarán en cada una de las cinco categorías principales de prueba como se muestra en la Figura 7.
Ejecutar la prueba y evaluar el rendimiento del MGCS
Al desarrollar un enfoque de prueba, se debe considerar tanto los escenarios posibles, así como las métricas 3,12,13,17.
El enfoque de prueba propuesto para el MGCS incluirá los siguientes elementos y pasos 3,12,13,17:
Definir escenarios de prueba que permiten probar las funciones centrales en condiciones bien definidas y representativas.
Definir el entorno de prueba que va desde un entorno completamente simulado hasta equipos instalados en campo.
Un entorno de pruebas de simulación aceptable es un entorno de simulación en tiempo real con un enfoque de Hardware-in-the-Loop (HIL) para probar todos los elementos del MGCS 3,12,13,17.
3.1. Condiciones generales de prueba
El enfoque básico de prueba es establecer escenarios y conjuntos de prueba. El MGCS, junto con las funciones integradas en los diversos componentes de la MR, implementará y ejecutará las funciones centrales. Estos están asociados en IEEE Std 2030.8-2018 con métricas comprobables y verificables 3,17.
Fuente: Adaptada de IEEE 17. Nota: Y=YES, N=NO
Figura 6 Diagrama de flujo conceptual para las pruebas de las funciones básicas.
Las pruebas de la función despacho incluyen un conjunto de escenarios que reflejan tanto el funcionamiento normal como las condiciones de contingencia. Las pruebas conectadas a la red implican que el interruptor en el PDI está inicialmente cerrado, mientras que las pruebas en modo isla implican que el interruptor en el PDI está inicialmente abierto 17.
Las pruebas de transición incluyen un conjunto de escenarios con diferentes condiciones operativas iniciales, normalmente seguidas de una transición de estado del interruptor en el PDI. Para escenarios de prueba de isla planificada, se envía una orden de isla al MGCS, este, a su vez, enviará el flujo de energía de manera adecuada para reducir el flujo de corriente a casi cero a través del interruptor en el PDI y luego enviará un comando de apertura al mismo.
Los escenarios de prueba de isla no planificados implican situaciones de contingencia, como fallas que conducen al disparo obligatorio del interruptor en el PDI. Los escenarios de prueba de reconexión implican una orden de reconexión enviada al MGCS. Las señales de reconexión automática debidas al retorno de las condiciones normales de frecuencia y voltaje del lado de la red de distribución, durante un tiempo especificado proporcionan otro método para señalizar al MGCS. Este, verificará el despacho adecuado para ayudar a garantizar la sincronización de tensión del lado de la MR con la de la red de distribución, antes de cerrar el interruptor en el PDI. También envía la configuración de órdenes de cambio o confirmación de cambio de estado, según sea necesario, a los activos de la MR. En todos los casos, se concederá un período de tiempo suficiente para la recopilación de datos en cada ejecución del ensayo, a fin de verificar si el MGCS logra el despacho necesario antes y después de la transición de manera adecuada 17,18.
La Figura 7 muestra el diagrama de flujo conceptual, para probar las funciones centrales de un MGCS, que está destinado a incluir, como mínimo todas las pruebas obligatorias especificadas en la IEEE Std 2030.8-2018. Las pruebas se clasifican según la función principal que están diseñadas para evaluar. Cada prueba consta de múltiples escenarios y cada ejecución de prueba es una ejecución única de un escenario, y cada escenario incluye un conjunto único de condiciones iniciales:
Del interruptor en el PDI, los estados de los activos, el flujo de energía dentro de la MR, la configuración del MGCS y el evento o eventos iniciadores 3. Estos últimos siendo una secuencia de prueba incluyen el establecimiento del estado inicial de todos los interruptores y el despacho inicial de los activos de la MR. Una vez que se establecen las condiciones iniciales, un evento iniciador, como una falla en el sistema de energía o la apertura del interruptor, inicia la secuencia de prueba 3,19.
Para cada ejecución de prueba, se requiere la recopilación de datos específicos para los informes de prueba y el cálculo de las métricas. Este procedimiento deberá ser repetido para cada conjunto de escenarios y para cada prueba de función central aplicada. Cada falla dará como resultado un análisis, mitigación adecuada y volver a probar para los escenarios de prueba específicos en los que el MGCS no pudo tener éxito 17-19.
El diagrama de flujo de prueba para el despacho de activos de las MRs (ver Figura 7), se aplica a los diferentes modos operativos y proporciona un marco genérico que se aplica a todos los tipos de MRs. No todas las MRs tienen cargas variables, cambiadores de TAPS, de carga u otros activos del sistema identificados de la siguiente manera; por lo tanto, no todas las pruebas se aplican a todas las MRs 17-19.
3.2. Pruebas de la función de despacho
Las pruebas se presentan en la Tabla 8 y Tabla 9.
Tabla 8 Prueba para el escenario conectado a la red en estado estable.
| Condiciones iniciales (ver NOTA) | Iniciando eventos | Mediciones |
|---|---|---|
| -El interruptor de PDI está cerrado | -Perturbaciones en el sistema de potencia, incluidas las condiciones de circuito abierto o cortocircuito en la MR | V, f, P, Q, tiempo de estabilización, sobreimpulso y valores de estado estable (Stable State SS) dentro de los requisitos contractuales y limitaciones del equipo. |
| -Despacho de órdenes y objetivos. | -Disparo de recursos de energía distribuidos DERs | |
| -Estado del sistema de potencia; Esto incluye los estados del interruptor, las condiciones de flujo de potencia y las cargas desequilibradas. | -Cambio del punto de ajuste | |
| -Niveles de carga mínimos, promedio y máximos esperados. | -Arranque y parada de la carga más grande. | |
| -Combinaciones de DER, despachables y no despachables. | -Acción de todos los dispositivos de control de voltaje. |
Nota: algunas de las condiciones iniciales listadas no se pueden lograr con algunas microrredes. Esto se debe a que algunos DER o cargas no tienen la capacidad de ser ajustados de la manera solicitada. Si está disponible o es posible, todas las combinaciones de condiciones iniciales que se muestran en la tabla deberán ser probadas
Fuente: adaptada de IEEE17
Tabla 9 Pruebas para el escenario isla en estado estable.
| Condición inicial | Iniciando eventos | Mediciones |
|---|---|---|
| -El interruptor de PDI está abierto. | -Perturbaciones en el sistema de potencia, incluidas las condiciones de circuito abierto o cortocircuito en la MR | V, f, P, Q, tiempo de estabilización, sobreimpulso y valores de estado estable (Stable State SS) dentro de los requisitos contractuales y limitaciones del equipo. |
| -Despacho de órdenes y objetivos. | -disparo de los DERs | |
| -Estado del sistema de potencia; Esto incluye los estados del interruptor, las condiciones de flujo de potencia y las cargas desequilibradas. | -Cambio del punto de ajuste | |
| -Niveles de carga mínimos, promedio y máximos esperados. | -Arranque y parada de la carga más grande. | |
| -Combinaciones de DER despachables y no despachables. | -Acción de todos los dispositivos de control de voltaje. | |
| -La carga total de P y Q disminuyó/aumentó o las contribuciones de los DER aumentaron/disminuyeron hasta el punto en que cada DER se ve obligado a alcanzar los niveles mínimos/máximos de producción previstos. |
Fuente: adaptada de IEEE17
3.3. Pruebas de las funciones transición/despacho
Las pruebas se presentan en la Tabla 10, Tabla 11 y Tabla 12.
3.4. Métrica
En los procedimientos de prueba, basados en los escenarios utilizados para probar las funciones centrales, las únicas variables que se miden son la tensión y la corriente. Las cantidades derivadas son la frecuencia, la potencia activa y reactiva, y los índices relacionados con la calidad de la energía (armónicos de tensión y corriente, caídas y subidas de tensión, parpadeo [flicker]) 17.
En este estándar solo se tratará con el estado estable (SS stable state) y la respuesta transitoria de voltaje, frecuencia e intercambios de potencia (activa y reactiva) en el PDI. Están disponibles estándares relevantes para la determinación de otras cantidades 17.
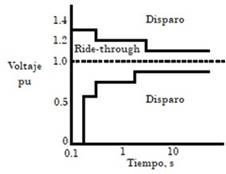
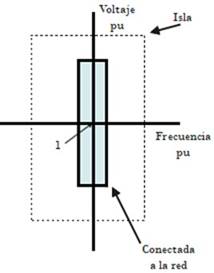
La forma típica de los rangos de operación permitidos de la MR en el PDI en términos de voltaje y frecuencia se muestran en la Figura 8 y Figura 9 17.
Fuente: adaptada de IEEE 17
Figura 7 Rangos de voltajes comunes (universales): modo conectado a la red.
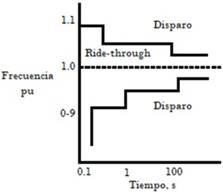
Tabla 10 Prueba para el escenario isla planificada.
| Condición inicial | Iniciando eventos | Mediciones |
|---|---|---|
| -El interruptor de PDI está cerrado | Recibir el comando de isla planeada | V, f, P, Q, tiempo de estabilización, sobreimpulso, tiempo de ir hacia el modo isla, valores de SS dentro de los requisitos contractuales y limitaciones del equipo. |
| -Despacho de órdenes y objetivos | ||
| -Estado del sistema de potencia; Esto incluye los estados del interruptor, las condiciones de flujo de potencia y las cargas desequilibradas. | ||
| -Exportación e importación mínimas, medias y máximas esperadas de P y Q | ||
| -Niveles de carga mínimos, promedio y máximos esperados | ||
| -Combinaciones de DER, despachables y no despachables |
Fuente: adaptada de IEEE17
Tabla 11 Prueba para el escenario de isla no planificada.
| Condición inicial | Iniciando eventos | Mediciones |
|---|---|---|
| -El interruptor de PDI está cerrado | Desconexión de PDI no planificada (ver NOTA 1). | V, f, P, Q, tiempo de estabilización, sobreimpulso y valores de SS dentro de los requisitos contractuales y las limitaciones del equipo para cada condición inicial, según corresponda. |
| -Despacho de órdenes y objetivos | ||
| -Estado del sistema de potencia; Esto incluye los estados del interruptor, las condiciones de flujo de potencia y las cargas desequilibradas. | ||
| -Exportación e importación mínimas, medias y máximas esperadas de P y Q | ||
| -Niveles de carga mínimos, promedio y máximos esperados | ||
| -Circuito abierto, cortocircuito, o desviaciones de voltaje o frecuencia del sistema con respecto a los requisitos contractuales de aprobación. | ||
| -Combinaciones de DER despachables y no despachables | ||
| -El interruptor de PDI está abierto | Black Start solicitado | V, f, P, Q, tiempo de estabilización, sobreimpulso y valores SS dentro de los requisitos contractuales, secuencia de eventos y limitaciones del equipo. |
| -Sistema desenergizado en todos los casos | ||
| -Comience con todos los DER disponibles o restringidos (vea la NOTA 2) | ||
| -Todas las cargas conectadas o desconectadas |
NOTA 1: el dispositivo de desconexión puede ser un interruptor, un interruptor de estado sólido, un reconectador, un contactor u otro dispositivo de interrupción de corriente.
NOTA 2: Ejemplos de restricción DER son baterías con carga limitada, baterías con celdas fuera de servicio, calderas con capacidad reducida (toneladas por hora), turbinas eólicas con capacidad limitada.
Fuente: adaptada de IEEE17
Tabla 12 Prueba para el escenario de reconexión.
| Condición inicial | Iniciando evento | Mediciones |
|---|---|---|
| -El interruptor de PDI está abierto | Señal de reconexión recibida | V, f, P, Q, tiempo de establecimiento, sobreimpulso y valores de SS dentro de los requisitos contractuales, tiempo de reconexión y limitaciones del equipo. |
| -Despacho de órdenes y objetivos | ||
| -Estado del sistema potencia; Esto incluye los estados del interruptor, las condiciones de flujo de potencia y las cargas de desequilibrio. | ||
| -Exportación e importación mínimas, medias y máximas esperadas de P y Q | ||
| -Niveles de carga mínimos, promedio y máximos esperados | ||
| -Combinaciones de DER despachables y no despachables | ||
| -Diferencia de frecuencia y voltaje en el PDI fuera de especificaciones | ||
| -Escenarios de bus a probar, live/live, live/dead, dead/ dead | ||
| -Comience con una capacidad DER restringida (rampa de velocidad u otras restricciones que dificulten la reconexión). | ||
| -para la prueba, todos los DER no despachables se establecen dentro de los niveles de potencia más altos y bajos. | ||
| -Use cargas variables en el tiempo o DER en algunos casos. | ||
| -Carga de microrred mayor que la capacidad total de DER |
Fuente: adaptada de IEEE17
Requisitos de tensión y frecuencia en estado estable SS y transitorio: La Figura 8 y 9 presentan rangos generales de la tensión y frecuencia dentro de una MR cuando esta se encuentra conectada al sistema eléctrico de potencia (PES power electrical system). Estas figuras muestran los tiempos que puede estar conectada la MR al PES ante alguna perturbación, después que se sobrepase esos límites de tensión, frecuencia o tiempo, habrá una desconexión de la MR 17-19.
El operador/propietario de la MR y el PES deberán tener un acuerdo de interconexión. La Figura 8 y 9 muestran rangos generales de operación para el voltaje y la frecuencia, y estos deben estar estipulados dentro de un contrato legal entre las partes mencionadas anteriormente.
Cuando la MR se encuentra en modo aislado, esta tiene la autonomía de trabajar con la tensión y frecuencia deseada, mientras que cuando está conectada a la red, el PES es quien establece estos rangos, por tal motivo, en la Figura 10 se muestra un rango más amplio para la tensión y frecuencia cuando la MR se encuentra en modo isla en comparación con el modo conectado a la red.
Fuente: adaptada de IEEE 17
Figura 9 Rangos de tensión y frecuencia en los modos conectado a la red e isla.
Métricas para respuestas de potencia activa y reactiva: Las variaciones de potencia real y reactiva durante los transitorios que se producen en las transiciones se caracterizan por el tiempo de subida, sobreimpulso, tiempo de estabilización y errores de estado estable SS. Las respuestas representativas se muestran en la Figura 10 17,20.

Fuente: adaptada de IEEE 17
Figura 10 Representación de una respuesta representativa de los controladores P y Q en el PDI.
Los parámetros asociados con la respuesta están especificados por los requisitos de interconexión. Estos parámetros se identifican en el contrato de interconexión, las especificaciones del propietario o las especificaciones del equipo. Posteriormente, los datos capturados se utilizan para confirmar que las métricas cumplen con la especificación. Los parámetros están asociados con el rendimiento del MGCS y están sujetos al controlador DER, la respuesta de carga y otras características del sistema. Esta interacción estrechamente acoplada de los controladores a través de la MR es la principal razón por la que se usa el término sistema de control de la microrred MGCS en lugar de controlador de la MR. Esta interacción está estrechamente acoplada a los controladores a lo largo de la MR, esta es la razón principal del uso MGCS y no controlador o controladores 17.
El cumplimiento de los requisitos del MGCS con los estándares presentados, deberán ser determinados mediante pruebas de acuerdo con los escenarios de pruebas y las cláusulas de las métricas. Las pruebas serán realizadas por el proveedor y según lo requiera la empresa de servicios públicos o entidad a la que está conectada la MR, de acuerdo con sus requisitos de interconexión, acuerdos y especificaciones del sistema 17-20.
Los requisitos de aprobación/falla deben ser definidos y acordados conjuntamente por las partes interesadas involucradas, incluida la empresa de servicios públicos y el propietario/operador de la MR 17-20.
4. Comunicaciones recomendadas por IEEE Std 2030.9-2019
El sistema de comunicaciones de las MRs utiliza una variedad de tecnologías de comunicación. Este sistema debe tener alta confiabilidad y rendimiento en tiempo real 22.
Los métodos recomendados son 12) (13) (21) (22) (23:
De acuerdo con la escala de la MR, la capa local puede usar el propio protocolo de comunicación, cómo RS485, Ethernet industrial. También se puede usar fibra óptica o transmisión inalámbrica.
La parte de protección de la MR, generalmente requiere comunicación de alta velocidad, por lo tanto, se recomienda la comunicación de red dual. Para la parte de control se puede usar solo una red, la cual será para transmitir mensajes. La parte de control centralizado debería tener una fuerte capacidad de transmisión de datos y además con muy buena calidad. Por lo tanto, se recomienda usar tecnologías de comunicación adecuadas para largas distancias y de gran capacidad, como tecnologías PTN, el protocolo IEC61850-9-2+GOOSE, y entre otros.
El control óptimo y la comunicación de la capa de monitoreo deben considerar la demanda del objeto de control, el objetivo y la velocidad. Se recomienda utilizar una única red Ethernet rápida.
Para algunos requisitos especiales de la red de funciones del dispositivo, deben considerarse por separado. Por ejemplo, considerando el gran volumen de datos, debido a la grabación de fallas y calidad de energía, se recomienda usar una red separada y comunicarse con el sistema de monitoreo en segundo plano a través de un servidor. Se debe establecer un firewall para el acceso del sistema de energía inteligente, el sistema de carga de vehículos eléctricos y el sistema de análisis de datos meteorológicos a la estación maestra de monitoreo.
Al diseñar el método para la comunicación entre la MR y el centro de control del PES, este centro de control solo necesita monitorear y controlar el interruptor en el PDI, sin involucrar el equipo interior de la MR. En este caso, el modo de comunicación puede adoptar la comunicación por cable o inalámbrica, incluidas las redes públicas GPRS (General Packet Radio Service), CMDA (Code Division Multiple Access) y LTE (Long Term Evolution). Sin embargo, cuando el centro de control de nivel superior necesita realizar un control u operación remota en el equipo interior de la MR, se recomienda una red privada cableada, como cable de par trenzado, fibra óptica, EPON, entre otros. Esto ayudará a garantizar la seguridad de la MR.
Finalmente, para el protocolo de comunicación entre la MR y el centro de control de nivel superior, se recomienda usar, DNP3, IEC-60870-5-101, 104, o la parte correspondiente al estándar IEC 61850 con el fin de lograr una adecuada interoperabilidad de la MR.
5. Conclusiones
El artículo presentado resume de forma clara y específica, los requerimientos y pruebas del sistema de control, establecidos en los estándares IEEE Std 2030.7-2017 y IEEE Std 2030.8-2018, mencionando las funciones centrales, y de cómo se prueban estas, teniendo en cuenta los diferentes escenarios y métricas. Se espera que esta síntesis pueda servir de guía a partes interesadas, en cuanto a los requerimientos que se deben de cumplir dentro de un MGCS.
El cumplimiento con los requisitos del sistema de control permite que haya interoperabilidad, además disminuye el riesgo de afectar negativamente la red de distribución, donde se conectará la MR.
En cuanto a lo abordado con anterioridad, se puede observar que es necesario poder contar con requerimientos y pruebas, ya que esto permite verificar mediante métricas establecidas, la confiabilidad del MGCS durante su operatividad.
Es fundamental de acuerdo como se plantea en la IEEE 2030.8-2018 la validación del sistema de control usando los gemelos digitales mediante laboratorios de tiempo real con el fin de disminuir el riesgo, costo y tiempo antes de su implementación. Por tal motivo, se espera que este artículo pueda ayudar a la verificación del funcionamiento del MGCS antes de su puesta en servicio, mediante las pruebas que se presentaron dentro del documento.

