











 English (pdf)
English (pdf)
 Article in xml format
Article in xml format Article references
Article references
 Send this article by e-mail
Send this article by e-mail Cited by SciELO
Cited by SciELO  Cited by Google
Cited by Google  Similars in
SciELO
Similars in
SciELO  Similars in Google
Similars in Google 
 Permalink
Permalink
Introduction
Computer vision (CV) is a field of computer science that focuses on the development of algorithms and techniques that allow computers to "see" and understand the world around us. Computer vision includes image processing, machine learning and pattern recognition to extract information of interest from image data; it can also be used to perform tasks such as: object detection, image classification, edge detection, object tracking, among others 1.
Computer vision is increasingly used in the world of inventory 2 and security 3. According to Arias, computer vision is very useful for inventory control, as well as for detecting unwanted objects, allowing to improve security by recognizing potentially dangerous objects such as weapons or bombs and alerting users 3. On the other hand, Kalahiki proposes the use of CV to achieve a more reliable inventory control by means of several existing techniques such as: data collection, data preprocessing and transfer learning 2.
This paper seeks to solve the following question: how can we use CV to count the elements of an inventory when it is modified by human interaction? The answer to this question provides a technological alternative to inventory control, increasing security and keeping a permanent control over the elements, thus helping companies to be more effective in keeping track of items entering or leaving their inventories or identifying objects that should not be in their inventory.
Methodology
MediaPipe
MediaPipe is a framework for building applied multimodal machine learning pipelines (such as video, audio, time series data, etc.), and for different platforms (e.g., Android, iOS, Web, and perimeter devices). MediaPipe provides multiple features, including face detection, hand tracking, gesture detection, and object detection 4.
Hand tracking
MediaPipe hand tracking uses a machine learning (ML) process with two models working together:
A palm detector that operates on a complete input image and locates palms by means of an oriented hand bounding box.
A hand landmark model that operates on the cropped hand bounding box provided by the palm detector and returns high fidelity 2.5D landmarks.
By identifying the clipped palm image with the hand-held landmark model, see Figure 1, the need for data augmentation (e.g., by rotations, translations, and scaling) is drastically reduced and allows the network to focus more on the accuracy of landmark localization. In a real-time tracking scenario, a bounding box is obtained from the previous frame's landmark prediction as input for the current frame, thus avoiding applying the detector on every frame. Instead, the detector is only applied at the first frame or when the hand prediction indicates that the hand has been lost 5.
Palm detection model
According to Zhang 5 detecting hands is a complex task, as it requires several challenges, the model must be able to recognize hands in a variety of sizes and be able to detect them even when they are occluded or self-occluded. Unlike faces that have contrasting patterns, for example, around the eyes and mouth, the lack of such features in hands makes it comparatively more difficult to detect them reliably from their visual features alone. To solve these challenges, Zhang 5 proposes to address them with different strategies, the first is to perform palm training, rather than a hand detector, since, according to them estimating bounding boxes of rigid objects such as palms and fists is much simpler than detecting hands with articulated fingers. Since palms are smaller, the "non-maximal suppression" algorithm works even in complex cases such as a handshake.
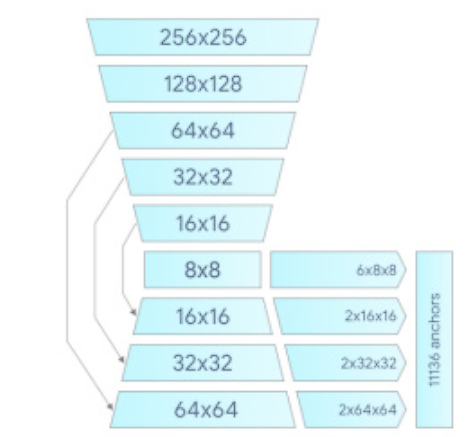
Palms can be modeled using only bounding boxes, ignoring other aspect ratios, which reduces the number of anchors. After this process, they use an encoder-decoder feature extractor such as FPN to have greater awareness of the scene context, even for small objects, and finally, they minimize the focal loss to handle many anchors resulting from high scale variability. The high-level palm detector architecture is shown in Figure 2.
Hand reference model

Figure 2 Architecture of the MediaPipe hand detection model. The model has three outputs that share a feature extractor. Each head is trained by corresponding data sets marked in the same color. 5
After running palm detection on the entire image, the subsequent hand landmark model performs an accurate localization of 21 2.5D coordinates within the hand regions detected through regression. The model learns a consistent internal hand pose representation and is robust even to partially visible hands and self-hiding. The model has three outputs, see Figure 3:
21 hand reference points consisting of "x, y" coordinates and relative depth, see Figure 3.
An indication of the probability of hand presence in the input image.
A binary classification of laterality of the hand, e.g., left, or right hand.

You Only Look Once (YOLO)
YOLO was presented to the public in 2015 6, due to its speed, accuracy, and ability to run in real time, its use for object detection became widespread. It is based on the Googlenet architecture 7, the operation of YOLO consists in the division of the image into a grid, where in each cell is verified if there is an object of interest inside. With this process, several bounding boxes of different sizes are generated, it must be defined with what confidence level a prediction of the existence of an object is made. A high confidence level implies that the algorithm will be stricter in detecting and classifying an object and a low confidence level will make the algorithm more permissive in detecting and classifying.
Versions
YOLOv4 and YOLOv5 introduce changes that generate an improvement in speed and performance tested in different benchmarks. YOLOv5 delivers similar results to YOLOv4, but its training time is even shorter. In addition, the development of this architecture is implemented natively in Pytorch, unlike previous versions based on Densenet.
Additionally, YOLOv5 consists of different models, which have different configurations see Figure 4, so the right model should be chosen according to the specific needs of each project, so it should be determined whether higher accuracy or speed is required. Models such as YOLOv5x and YOLOv5x6 will produce better results in terms of accuracy and detection, but have more parameters, require more CUDA memory to train and are slower to run. Ultralytics recommends using the smaller models for mobile development, and the larger models for development with cloud-based architectures.
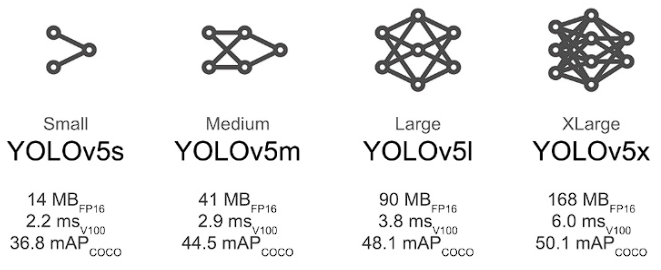
Figure 4 Analysis speed, mAP and weight of the different YOLOv5 models. Image taken from the ultralitycs github repository 8.
The diagram below shows the general methodology, see Figure 5.
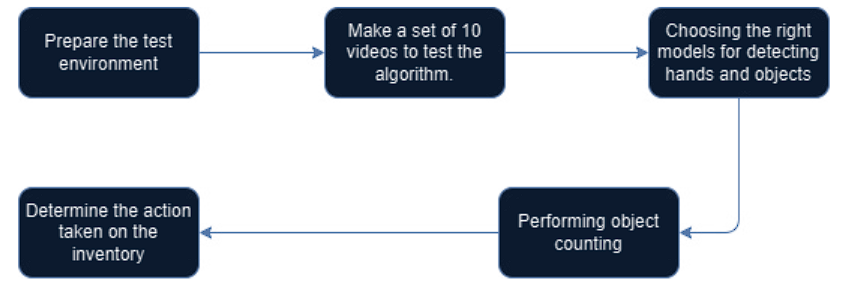
Prepare the test environment
The preparation of the test environment consisted of preparing the surface for the experiment. A red and blue tablecloth was used on a table to contrast with the kitchen utensils. Additionally, a light control was carried out with two halogen lamps. To reduce the shadows that would cause an erroneous counting and detection by the algorithm.
Make a set of 10 videos to test the algorithm
A set of videos was built in order to perform different tests and with them identify the different states of the elements of interest. Each video presents a different challenge for the models, such as: obstruction or overlapping of objects, objects away from the sensor's field of view, adding or removing two or more objects at the same time, or recognizing when 1 or 2 hands enter and leave.
Choosing the right models for detecting hands and objects.
Tests were performed on different models for hand and object detection, these tests used the video set to determine which algorithms performed best in detecting the objects of interest. The measure used to select the most suitable model was accuracy.
Performing object counting.
The counting of objects was performed by defining a list of objects of interest, this list serves as a control element that allows the algorithm to filter the objects of interest from the other elements, once the individualization of the objects is done, a count is performed, so the algorithm had the ability to count the objects that are of interest to the algorithm.
Determine the action taken on the inventory.
The algorithm can determine two types of actions: the first consists of adding items to the inventory and the second action removes the items from the sensor's field of view.
To determine these actions, the objects are counted at two points, when the hand is detected and when the hand is no longer detected. When the hand is not detected, the algorithm compares the counts before and after the human intervention; if the count of objects after the human intervention is higher, the action of adding objects to the inventory is determined, otherwise it is determined that objects were taken.
The expected response should be as follows, see Figure 6:
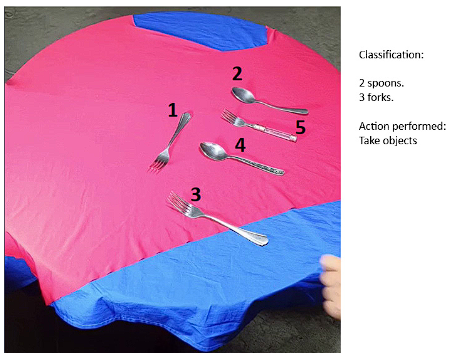
Figure 6 On the left, organization of the inventory elements and their respective count when the hand is no longer detected by the sensor; on the right, the message of the algorithm indicating the classification and count of the objects and the action performed in the inventory. In this case: Take objects.
Results and discussion
In the development of this work, different models and algorithms were used to determine the ideal model in terms of detection, robustness, and reliability, obtaining the following results:
Hand detection metrics
For hand detection and tracking we used the EgoHands dataset, a dataset specialized in hands, labeled, and created by Sven B, Stefan L, David C and Chen Y of Indiana University 9, it was decided to test the hand recognition algorithm. Modifications were made to the dataset to change the features and categories of the images since from these it is possible to discard whether it is a left hand or a right hand or other features that this model does not need for its operation. These data give us information regarding the performance of the model in terms of its ability to correctly identify positive and negative samples. Figure 7.
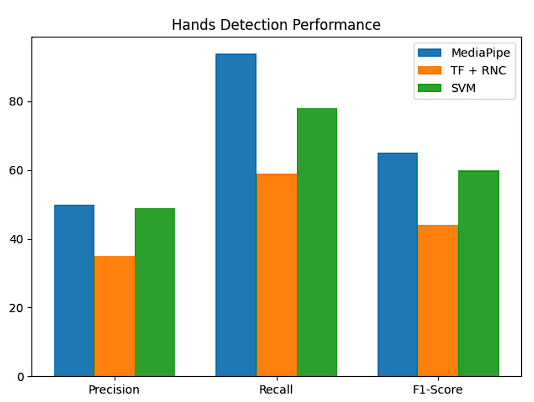
Figure 7 Hand detection performance evaluation graph, using different algorithms: MediaPiPe, Tensorflow combined with Convolutional Neural Networks and Support Vector Machines.
In general, higher accuracy and recall indicate better model performance, while a higher F1-score indicates a trade-off between accuracy and recall. Therefore, it is important to consider both accuracy and recall obtaining a complete assessment of model performance.
Object detection metrics
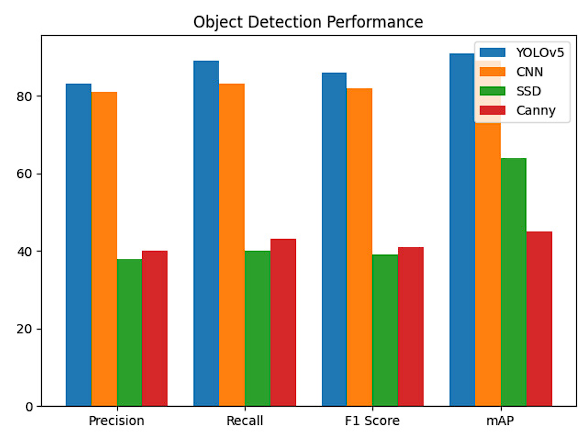
Since we could not find a specific dataset to test the performance in the detection of the objects of interest, we decided to generate one that would fit the needs of our use case. Figure 8
Results analysis
Three models were used for hand detection and tracking: MediaPipe, TensorFlow and SVM. Table 1 shows the performance of the models with the EgoHand dataset. These metrics reveal that the best model for hand detection is MediaPipe, although the accuracy was very low in all models, and in this case the one with the lowest performance was TensorFlow combined with Convolutional Neural Networks.
Table 1 Performance comparison between MediaPipe, TensorFlow, SVM for hand detection with the EgoHands dataset.
| Model | Precision | Recall | F1 Score |
|---|---|---|---|
| MediaPipe | 50% | 94% | 65% |
| TF + RNC | 35% | 59% | 44% |
| SVM | 49% | 78% | 60% |
Based on these results, it has been determined that MediaPipe has the best performance in hand detection and tracking.
Accuracy: The accuracy of 0.509 means that approximately half of the model's positive detections are correct, while the other half are false alarms.
Recall: The recall of 0.945 means that the model is very good at identifying the hands in the images, as it detects 94.5% of the hands present in the images.
F1-Score: The F1-score of 0.65 shows a balance between accuracy and recall. It may indicate that the model is doing a good job of maintaining a high recall while maintaining an acceptable level of accuracy.
On the other hand, for object count detection, tests were performed with 4 models: YOLOv5, convolutional neural networks and SSD MobileNet V2. The following results were obtained: Table 2.
Table 2 Performance comparison between YOLOv5, CNN, SSD and Canny for object detection and counting trained with a proprietary dataset.
| Model | Precision | Recall | F1 Score | mAP |
|---|---|---|---|---|
| YOLOv5 | 83% | 89% | 86% | 91% |
| CNN | 81% | 83% | 82% | 89% |
| SSD | 38% | 40% | 39% | 64% |
| Canny | 40% | 43% | 41% | 45% |
For object detection it was decided to opt for YOLOv5 even though the metrics were very similar with CNN, and it had a higher F1 Score, in general terms YOLOv5 had higher metrics and the F1 Score of this model indicated a very good performance.
Model comparison
Hand detection vs. object detection is a very high change from each other in terms of accuracy and F1 Score (approximately 30% difference), this is because EgoHands being a more specialized dataset, with a longer trajectory, presented a challenge for the models when looking for hands in unusual places or difficult to locate or hand size, This dataset consists of 3841 training images, from different places and situations; on the other hand, the training for object detection is presented as a dataset built according to the needs, presenting a base of 322 images, in easier situations that did not represent a challenge for the model.
Experimental results
In the context of this project, we sought to implement an algorithm that could recognize objects of interest in a live video sequence that would count the objects it detected. In order to test the algorithm, a set of 10 videos was created and metrics were taken with the pre-recorded videos, obtaining the following results, see Table 3:
Note: In Table 3, a False Positive (FP) or False Negative (FN) is taken as 0, A FP is determined as a successful count amount but labeled as different classes, and a FN is determined as a case where neither the count nor the class match; and cases marked as 1 are counted as True Positive (TP), a TP is counted as a successful count and classification of items; finally a dash (-) indicates that no more test were performed to the model in that video. "Tests" are defined as each hand-in and hand-out detection, in which the model performed the counting of items in the inventory, all videos had different "tests" with video 8 having the most with 11 inventory interactions and video 10 having the least with one interaction.
Table 3 Results of the 10 experimental test videos.
| Video | Test 1 | Test 2 | Test 3 | Test 4 | Test 5 | Test 6 | Test 7 | Test 8 | Test 9 | Test 10 | Test 11 |
|---|---|---|---|---|---|---|---|---|---|---|---|
| Video 1 | 1 | 1 | 1 | 1 | - | - | - | - | - | - | - |
| Video 2 | 0 | 0 | 1 | 0 | - | - | - | - | - | - | - |
| Video 3 | 0 | 1 | 1 | 0 | 1 | - | - | - | - | - | - |
| Video 4 | 1 | 0 | 0 | 1 | 0 | 0 | - | - | - | - | - |
| Video 5 | 1 | 1 | 1 | 0 | 1 | - | - | - | - | - | - |
| Video 6 | 0 | 0 | 0 | 1 | 0 | 0 | 0 | 1 | - | - | - |
| Video 7 | 1 | 0 | 0 | 0 | 1 | 0 | - | - | - | - | - |
| Video 8 | 1 | 1 | 1 | 1 | 1 | 1 | 1 | 1 | 1 | 0 | 0 |
| Video 9 | 0 | 0 | 0 | - | - | - | - | - | - | - | - |
| Video 10 | 0 | - | - | - | - | - | - | - | - | - | - |
Algorithm states
According to the tests performed, it was determined that the algorithm has three possible states as response, these states are successful case in which the classification, count and action performed are correct; unsuccessful case with misclassification, in which the count and action performed are correct but the classification is wrong; and finally, unsuccessful case with misclassification and count, in which the classification, count and action performed are not correct.
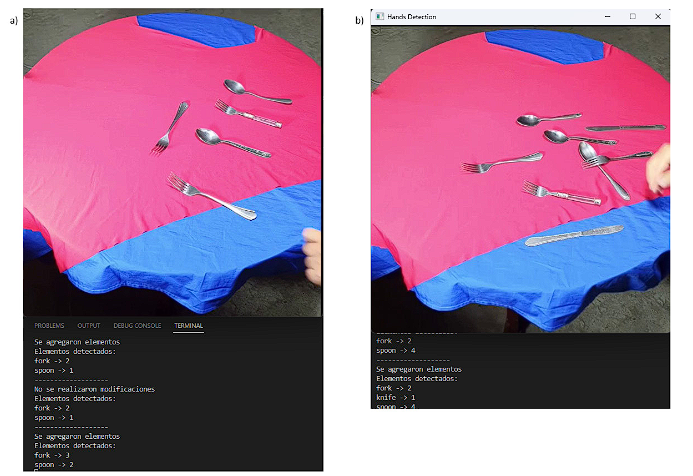
Successful case
A successful case is defined when a count and classification of objects is performed correctly, as shown in Figure 9a taken from video 1, we notice that the algorithm after not detecting the hand performs a correct classification, count and action since in the previous state of the inventory there were 2 spoons and a fork, after the human intervention 3 forks and two spoons were detected according to the program output, signaling the action as adding items.
Unsuccessful case, misclassification, and miscount
The second erroneous state can be seen in Figure 9b taken from video 9, in which neither the count nor the classification match what is observed in the image. In this video no classification was successful because it was decided to test the algorithm in usual conditions such as overlapping objects or not very common locations of the objects, this inventory configuration negatively impacted the accuracy of the algorithm in the detection and classification of objects.
Discussion
Object detection using VC has been a well-studied field and different models and algorithms have been proposed to achieve this goal, some examples are the model proposed by Narendra and Sinisa 10 which is based on detecting elements through the segmentation of primitive objects; or the algorithm proposed by Fidler which focuses its operation on the use of the Gabor filter 14. The work done by Pedro Felzenszwalb 13 describes an object detection system based on the combination of models of deformable parts at different scales. This system can represent highly variable object classes and achieves very good results in PASCAL object detection with approximately 91% accuracy.
Loïc develops a new object detection algorithm called DF-SSD 12, which results in an improvement of the Single Shot MultiBox Detector (SSD). DF-SSD uses Dense Convolutional Network (DenseNet) and feature fusion to address the lack of complementarity between SSD feature layers and its weak detection capability for small objects.
Hand detection and recognition has been mainly focused on the detection of distress signals 16 or as an aid in sign language 11, although according to Nathasia, in the field of machine learning, hand recognition is a difficult challenge to solve. There are different approaches to solve the problem of making VC recognize sign language gestures. In 2021, Aripita Halder, made a methodology that simplified sign language in real time using MediaPipe and SVM, obtaining an average accuracy of 99%, the proposed model is accurate, efficient and can help the communication process 15.
The referenced works have been used as a starting point and aid for the development of this research. In this work, a hand recognition and object classification system is designed and developed as a permanent inventory control measure, which is developed using MediaPipe and YOLOv5.
The algorithm is presented as an aid in inventory control and security because with it you can have greater control of inventory management and know when an item was added or removed at the time of human interaction. The presented algorithm apart from counting the objects can detect the hands that modify the inventory and detecting if I add or remove objects from the inventory, adding an extra to the control of objects in the inventory. Having a dataset built which was used for training and testing the YOLOv5 model, and a dataset specialized in hands for testing the Mediapipe model, the algorithm in a real environment obtained an accuracy of 43.7% in the recognition of objects and 96% in the recognition of hands, these results show that it can effectively perform a control of objects and detect when a human actor interferes in the inventory, and thus achieve to define the action taken.
To improve the accuracy of the algorithm in object recognition by means of the dataset, Kalahiki proposes a constant training approach and thus increase the accuracy of the algorithm in object recognition by preparing it to recognize objects in different positions, light settings, or places where the original dataset would not have been contemplated. Making these changes implies an extra work in the training, but, at the same time, it implies an increasingly more efficient model in terms of recognition according to the results presented by Kalahiki (see Table 4). The accuracy increases each week as new images taken from the same videos that have difficulty to be recognized are trained. In Kalahiki's work, it starts with an accuracy of 61.92% for the linear activation function and in week 3 it increases by 3.68% leaving the accuracy at 65.6%, this model turns out to give a good alternative because as it is trained with more images its algorithm will become more robust.
Table 4 Average accuracy in the generalization data set by activation function. Data taken from 2
| Activation function | Initial average | Average in week 1 | Average in week 2 | Average in week 3 |
|---|---|---|---|---|
| Lineal | 61.92% | 62.4% | 63.83% | 65.6% |
| ReLU | 62.49% | 62.89% | 64.24% | 66.39% |
| Leaky ReLU | 63.16% | 62.35% | 63.58% | 66.59% |
| SELU | 62.62% | 62.7% | 63.75% | 65.77% |
On the other hand, this work proposes to focus on the classification and counting of objects being activated when a hand passes through the field of action of the sensor, and determine the action performed, this algorithm had an accuracy of 43.7% in object recognition and 96% in hand recognition, with which the same treatment proposed by Kalahiki could be performed and make the algorithm more robust and prepared to different states not contemplated in the original dataset.
Arias proposes the use of CV using support vector machines (SVM) for a more agile recognition of potentially dangerous objects in an airport context, identifying handguns. Arias obtained a performance increase of 93.36% with respect to a previous implementation using parallel programming, as well as a satisfactory classification of 93.02% in images containing firearms. The algorithm proposed in this work executes the hand and object detection algorithms in parallel, but only makes use of YOLOv5 when the hand is detected, thus avoiding a constant use of object detection and reducing the computational cost of analyzing the frames of each video, this means an improvement in the performance of the algorithm, presenting the following results (see Figure 10).
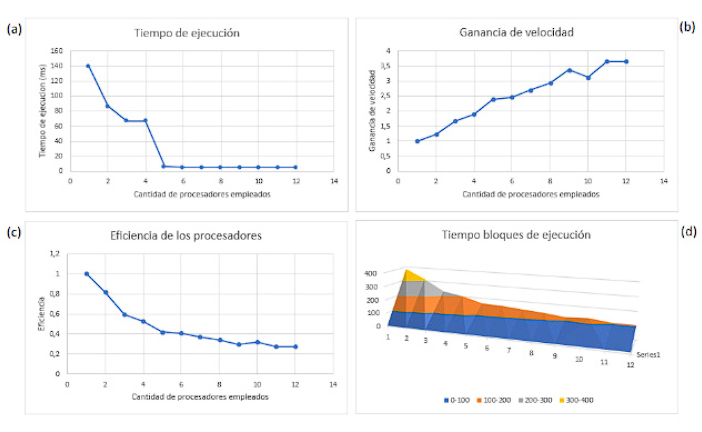
Figure 10 Computational performance graph of the detection model with MediaPipe and YOLOv5; a) code execution time in ms, with different processors in use; b) speed gain based on the processors used; c) algorithm efficiency with different processors in use; d) code block execution time in ms.
With a data set and focused training, this algorithm could serve as a model for the recognition and counting of objects other than those proposed in this article. It presents itself as a good opportunity for inventory control in stores, warehouses, or other places where inventory control is required.
The lack of images to perform the training and the proper integration with the YOLOv5 tool is one of the main causes for which the counting and recognition of cutlery was low, with an adequate data set the accuracy metrics would improve, making the algorithm more useful, being able to overcome the challenges that in its current version, is not able to solve, such as self-occlusion, overlapping objects, or objects partially detected by the field of action of the sensor, for that reason it is expected to have a better prepared dataset and thus improve the recognition of objects.
Conclusions
For hand recognition it is necessary to properly configure MediaPipe, this means that the thresholds must be leveled, a very high one will mean a more thorough detection by the algorithm, which leads to hand recognition under certain very specific conditions, the opposite case means that the algorithm will be more permissive in recognizing hands and any object in the field of view of the sensor could be recognized as such.
As with MediaPipe, YOLOv5 must be configured correctly in terms of threshold classification and detection confidence, this allows for greater control when discarding or recognizing an object within the inventory and recognizing it correctly.
The counting of the objects falls fundamentally on the classification model, a bad classification means a bad counting of objects which in turn indicates an erroneous action by the user, a more exhaustive training must be carried out so that the algorithm can recognize and classify the objects, and this will automatically mean a better counting of the inventory elements.
At the time of obtaining the MediaPipe metrics, the set of test images showed a low score in terms of accuracy, recall and F1, but, at the time of experimentation, the metrics showed a high percentage in all aspects, the opposite case occurred with the MediaPipe metrics, this is due to the quality of the test data versus the experimentation data.
The experimentation also showed a weak point in terms of recognition on surfaces with a color like the objects of interest, the silver-colored cutlery, in the experimentation it was found that with a white surface YOLO did not recognize the objects of interest, therefore, the decision was made to have a surface that contrasted the objects of interest.

